UWB Radar SLAM
- Citation Author(s):
-
Charith Premachandra
 (Singapore University of Technology and Design)
(Singapore University of Technology and Design)
- Submitted by:
- Hanchapola Appuhamilage Gihan Charith
- Last updated:
- DOI:
- 10.21227/shx8-gw47
- Data Format:
 151 views
151 views
- Categories:
- Keywords:
Abstract
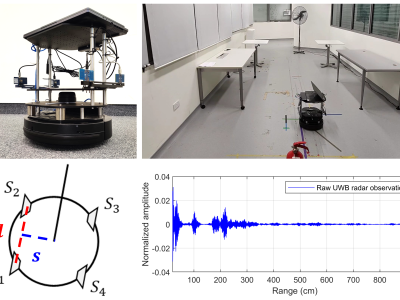
Ultra-wideband radar (UWB) is capable of perceiving the surroundings irrespective of the visibility due to its broad frequency spectrum. Therefore, UWB technology can be employed in mobile robots to perform simultaneous localization and mapping (SLAM) in vision-denied environments (e.g. smoke, fog, walls with reflective surfaces). We chose four different environments to teleoperate a TurtleBot2 nonholonomic robot equipped with Novelda X4M300 monostatic radar modules and RPLIDAR-A2 laser range scanner(s). The UWB radar and laser scan observations alongside the robot's bringup topics and parameters were recorded into a bag file in ROS2. The environments are: laboratory with smoke, dance studio with reflective surfaces (i.e. mirrors), a long corridor, and around a trapezoidal-shaped classroom in SUTD. Each left and right-hand side of the robot has two UWB radar modules arranged on a line. Meanwhile, the laser scans can be used to obtain the ground truth of the robot.
Instructions:
Please read the documentation file.







