NLOS Identification and Mitigation Using Low-Cost UWB Devices
- Citation Author(s):
-
Valentin Barral
 (University of A Coruña)
Carlos J. Escudero
(University of A Coruña)
Jose Antonio García-Naya
(University of A Coruña)
Carlos J. Escudero
(University of A Coruña)
Jose Antonio García-Naya
- Submitted by:
- Valentin Barral
- Last updated:
- DOI:
- 10.21227/swz9-y281
- Data Format:
- Links:
 2186 views
2186 views
Abstract
Instructions:
Important:
If you have used this data in a scientific publication, we would appreciate citations to the following paper:
Barral, V.; Escudero, C.J.; García-Naya, J.A.; Maneiro-Catoira, R. NLOS Identification and Mitigation Using Low-Cost UWB Devices. Sensors 2019, 19, 3464. https://doi.org/10.3390/s19163464
How to use:
In Matlab:
los = load('LOS.mat');
nlos_h = load('NLOS_H.mat');
nlos_s = load('NLOS_S.mat');
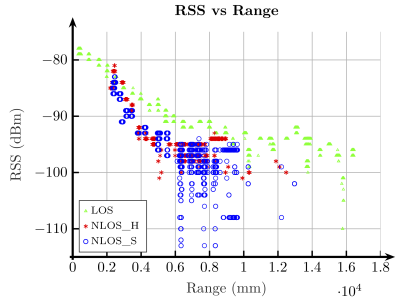
where "LOS.mat" contains the measurements in the LOS scenario, "NLOS_H.mat " includes the measurements of an NLOS Hard scenario, and "NLOS_S.mat" includes the measurements of an NLOS Soft scenario.
Data is stored in a 1x1 struct named logRanging that includes:
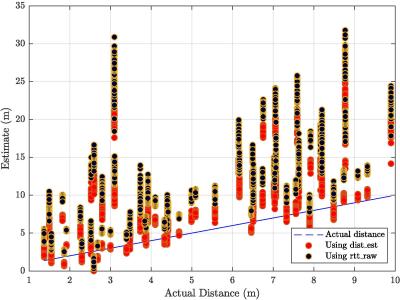
- realRange (Nx1) double The actual distance between anchor and tag. In cm.
- range (Nx1) int64. The value outputted by the device. In cm.
- rxPower (Nx1) double. The received power strength. In dBm.
- timestamp (Nx1) double. Measurement timestamp. In unix time.
- angle (Nx1) double. Not used in this set.