Datasets
Open Access
Environment cross validation of NLOS machine learning classification/mitigation in low-cost UWB positioning systems

- Citation Author(s):
-
ValentínBarral
 University of A CoruñaCarlos J.EscuderoUniversity of A CoruñaJosé A.García-NayaUniversity of A CoruñaPedroSuárez-CasalUniversity of A Coruña
University of A CoruñaCarlos J.EscuderoUniversity of A CoruñaJosé A.García-NayaUniversity of A CoruñaPedroSuárez-CasalUniversity of A Coruña - Submitted by:
- Valentin Barral
- Last updated:
- Tue, 05/17/2022 - 22:21
- DOI:
- 10.21227/rhhs-fw33
- Data Format:
- Link to Paper:
- License:
- Creative Commons Attribution
 1052 Views
1052 ViewsAbstract
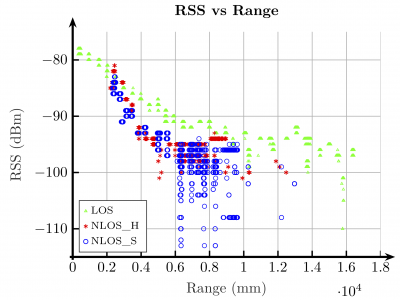
Indoor positioning systems based on radio frequency systems such as UWB inherently present multipath related phenomena. This causes ranging systems such as UWB}to lose accuracy by detecting secondary propagation paths between two devices. If a positioning algorithm uses ranging measurements without considering these phenomena, it will make important errors in estimating the position. This work analyzes the performance obtained in a localization system when combining location algorithms with machine learning techniques for a previous classification and mitigation of the propagation effects. For this purpose, real cross scenarios are considered, where the data extracted from UWB low-cost devices for the training of the algorithms come from different environments than those considered for the real application and its analysis.
Please, if you use this dataset in your research activities, please add a reference to our related paper:
Barral, V.; Escudero, C.J.; García-Naya, J.A.; Suárez-Casal, P. Environmental Cross-Validation of NLOS Machine Learning Classification/Mitigation with Low-Cost UWB Positioning Systems. Sensors 2019, 19, 5438. https://doi.org/10.3390/s19245438
These are Matlab files.
The measurements were recorded in the scenario shown in the figure.
Three configurations where used:
- "h0_front" contains the measurements with the tag facing North at the same height than the anchors.Height = 1.28m.
- "h0_back.mat " includes the measurements with the tag facing South at the same height than the anchors. Height = 1.28m.
- "h1_front" includes the measurements with the tag facing North at a higher altitude than the anchors. Tag Height = 2.05m. Anchors Height = 1.28m.
How to use:
In Matlab:
h0_front = load('h0_front.mat');
h0_back = load('h0_back.mat');
h1_front = load('h1_front.mat');
where
"h0_front" contains the measurements with the tag facing North at the same height than the anchors.
"h0_back.mat " includes the measurements with the tag facing South at the same height than the anchors.
"h1_front" includes the measurements with the tag facing North at a higher altitude than the anchors.
The file contains 3 arrays:
- beacons (1x5 struct) Contains the coordinates of each of the 5 anchors.
- pos (1x9 struct) Contains the coordinates of the 9 measurement points.
- ranging (1x9 struct) Each row contains the measurements from one of the 9 positions of the array. The struct includes:
- range (Nx1) int64. The value outputted by the device. In cm.
- rxPower (Nx1) double. The received power strength. In dBm.
- timestamp (Nx1) double. Measurement timestamp. In unix time.
- angle (Nx1) double. Not used in this set.
- destinationId (Nx1) int64. The index of the anchor

Dataset Files
 Pozyx Measurements Configuration H0_Back h0_back.mat (43.62 kB)
Pozyx Measurements Configuration H0_Back h0_back.mat (43.62 kB)- Pozyx Measurements Configuration H0_Front h0_front.mat (44.71 kB)
- Pozyx Measurements Configuration H1_Front h1_front.mat (44.81 kB)
Open Access dataset files are accessible to all logged in users. Don't have a login? Create a free IEEE account. IEEE Membership is not required.





