UWB
- Citation Author(s):
-
王 怡鹏
- Submitted by:
- wang peng
- Last updated:
- DOI:
- 10.21227/c99c-p027
 209 views
209 views
- Categories:
- Keywords:
Abstract
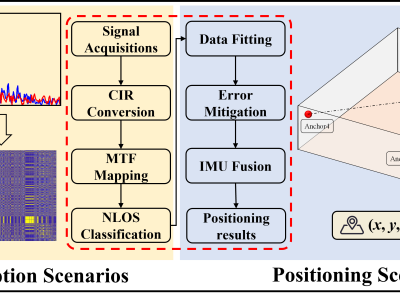
The overall process of UWB technology-based signal preprocessing and high-precision localization system architecture can be divided into two complementary modules: perception and localization. In “Sensing Scene”, the system firstly collects the CIR data generated in the environment through UWB sensors, and applies signal conversion and multi-dimensional feature mapping methods to analyze the signal attenuation characteristics of different NLOS environments, so as to realize the segmentation of the NLOS scene. A polynomial fitting method based on negative log-likelihood function, combined with EKF and IMU data fusion, is used to systematically correct the signal measurement error, thus significantly alleviating the localization deviation caused by occlusion and environmental interference. With the help of anchor points distributed everywhere in the space, the “positioning scene” realizes the dynamic positioning of the device in 3D space through ranging, and the acquired positioning data is further transmitted to the PC for display and in-depth processing, which provides a systematic and effective solution for high-precision positioning in complex environments.
Instructions:
收集数据使用OrIgin及逆行图像绘制,文件中包含excel文件,主要是UWB定位坐标解算