Multi-Sensor Accurate Forklift Location and Tracking Simulation in Industrial Indoor Environments - Dataset
- Citation Author(s):
-
Valentín Barral
 (UDC)
Pedro Suarez-Casal
(UDC)
Carlos J. Escudero
(UDC)
José A. García-Naya
(UDC)
Pedro Suarez-Casal
(UDC)
Carlos J. Escudero
(UDC)
José A. García-Naya
- Submitted by:
- Valentin Barral
- Last updated:
- DOI:
- 10.21227/b9tf-fv74
- Data Format:
- Links:
 1171 views
1171 views
- Categories:
- Keywords:
Abstract
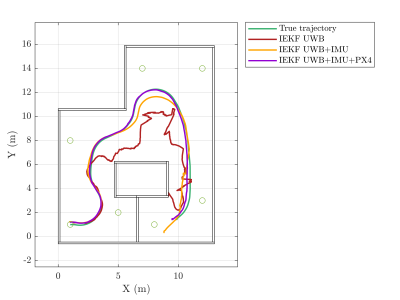
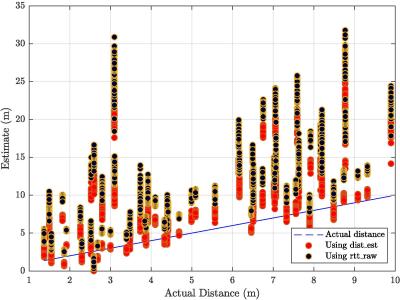
This dataset includes the measurements of a simulated vehicle inside a Gazebo simulation using different sensors: a simulated UWB tag, a IMU and a PX4Flow.
Instructions:
Please, if you use the datase, put a reference to our article:
Barral, V., Suárez-Casal, P., Escudero, C. J., & García-Naya, J. A. (2019). Multi-Sensor Accurate Forklift Location and Tracking Simulation in Industrial Indoor Environments. Electronics, 8(10), 1152. https://doi.org/10.3390/electronics8101152
The dataset includes several .mat files for each scenario. Each file contains a ROS set of topics. To read each topic is needed the Matlab Robotics System Toolbox. An example script is added.
AllMeasurementsScenarioXX.mat contains the sensor data and position estimates on scenario XX.
The available topics are:
- /gtec/gazebo/pos : Ground truth positions
- /gtec/kfpos_uwb : location estimates, only UWB
- /gtec/kfpos_uwb_imu : location estimates, UWB + IMU
- /gtec/kfpos_uwb_imu_px4: location estimates, UWB + IMU + PX4 FLOW
- /gtec/gazebo/imu : IMU data
- /gtec/gazebo/uwb/ranging/0: UWB ranging data
- /gtec/gazebo/px4flow: PX4Flow
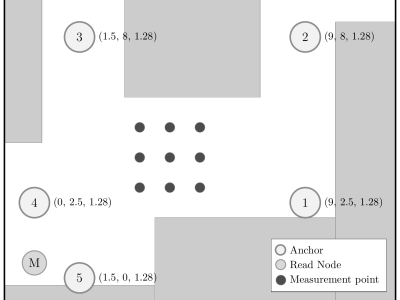
AnchorsScenarioXX.mat contains the positions of the UWB anchors in scenario XX.
The available topics are:
/gtec/gazebo/uwb/anchors/0 : The positions of each anchor.
ScenarioXXWalls.mat includes the position of the walls in the scenario XX.
The available topics are:
/tf : The positions of each model in the scenario.







The dataset is not working, please update, thanks!