Artificial Intelligence

Stable and efficient walking strategies for humanoid robots usually relies on assumptions regarding terrain characteristics. If the robot is able to classify the ground type at the footstep moment, it is possible to take preventive actions to avoid falls and to reduce energy consumption.
This dataset contains raw data from 10 inertial and torque sensors of a humanoid robot, sampled after the impact between foot and ground. There are two types of data: simulated using gazebo and data from a real robot.
- Categories:
 557 Views
557 Views
Cityscapes a new large-scale dataset that contains a diverse set of stereo video sequences recorded in street scenes from 50 different cities, with high quality pixel-level annotations of 5 000 frames in addition to a larger set of 20 000 weakly annotated frames. The dataset is thus an order of magnitude larger than similar previous attempts. Details on annotated classes and examples of our annotations are available at https://www.cityscapes-dataset.com/dataset-overview/#features.
- Categories:
180 Views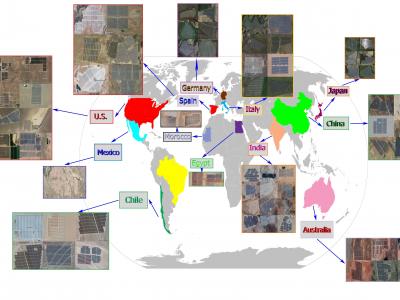
Extracting the boundaries of Photovoltaic (PV) plants is essential in the process of aerial inspection and autonomous monitoring by aerial robots. This method provides a clear delineation of the utility-scale PV plants’ boundaries for PV developers, Operation and Maintenance (O&M) service providers for use in aerial photogrammetry, flight mapping, and path planning during the autonomous monitoring of PV plants.
- Categories:
1415 Views
Detection results of the CircleNet with all test dataset with 1826 images
- Categories:
112 Views
Many applications benefit from the use of multiple robots, but their scalability and applicability are fundamentally limited when relying on a central control station. Getting beyond the centralized approach can increase the complexity of the embedded software, the sensitivity to the network topology, and render the deployment on physical devices tedious and error-prone. This work introduces a software-based solution to cope with these challenges on commercial hardware.
- Categories:
478 Views
we present a new conversational database that we have created and made publically available, namely ScenarioSA, for interactive sentiment analysis. We manually label 2,214 multi-turn English conversations collected from various websites that provide online communication services.
- Categories:
838 Views
This dataset is associated with the paper entitled "DeepWiPHY: Deep Learning-based Receiver Design and Dataset for IEEE 802.11ax Systems", accepted by IEEE Transactions on Wireless Communications. It has synthetic and real-word IEEE 802.11ax OFDM symbols. The synthetic dataset has around 110 million OFDM symbols and the real-world dataset has more than 14 million OFDM symbols. Our comprehensive synthetic dataset has specifically considered typical indoor channel models and RF impairments. The real-world dataset was collected under a wide range of signal-to-noise ratio (SNR) levels and at va
- Categories:
1928 Views
We test the consumed time of the three steps of the exchange model in order to show that our scheme is feasible.
- Categories:
108 Views
The training, validation, and test set used for Deep Xi (https://github.com/anicolson/DeepXi).
Training set:
- Categories:
4570 Views
This is the noisy-speech test set used in the original Deep Xi paper: https://doi.org/10.1016/j.specom.2019.06.002. The clean speech and noise used to create the noisy-speech set are also available.
- Categories:
929 Views