Aerial Imagery of PV Plants for boundary detection
- Citation Author(s):
-
Amirmohammad Moradi Sizkouhi (Amirkabir University of Technology)Mohammadreza Aghaei
 (Eindhoven University of Technology)
Sayyed Majid Esmailifar (Amirkabir University of Technology)
(Eindhoven University of Technology)
Sayyed Majid Esmailifar (Amirkabir University of Technology) - Submitted by:
- Mohammadreza Aghaei
- Last updated:
- DOI:
- 10.21227/g2bb-ms79
- Data Format:
 1473 views
1473 views
- Categories:
- Keywords:
Abstract
Extracting the boundaries of Photovoltaic (PV) plants is essential in the process of aerial inspection and autonomous monitoring by aerial robots. This method provides a clear delineation of the utility-scale PV plants’ boundaries for PV developers, Operation and Maintenance (O&M) service providers for use in aerial photogrammetry, flight mapping, and path planning during the autonomous monitoring of PV plants.
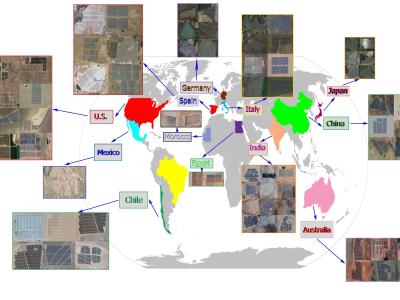
Preparing the data is the primary step for training a Fully Convolutional Network (FCN). Accordingly, the “Amir” dataset is developed for use in the autonomous monitoring of large-scale PV plants. This dataset includes a set of aerial imagery collected from different large-scale PV plants located in twelve countries from six continents. In the Amir dataset, all necessary data has been provided to train an accurate FCN model for boundary detection, including aerial imagery of PV plants and their masks. Amir covers many PV plants throughout the world. In addition, the aerial images are fully annotated to specify the boundaries precisely. Amir consists of 3580 aerial images from mainly large-scale PV plants. The Amir dataset has been developed for a research project entitled " smart and autonomous monitoring system for large-scale PV Plants''. The detail information about this dataset and its applications can be found in the paper entitled ''Automatic Boundary Extraction of Large-Scale Photovoltaic Plants using a Fully Convolutional Network on Aerial Imagery".
Instructions:
To use the Amir dataset, we need to use a Graphical Processing Unit (GPU). That's why our team decided to use Google's Colab System. Colab is an online platform that allows connecting to the Google Drive cloud, which required first the users to upload the dataset and connect with Colab. Therefore, to use this platform, we first need to upload aerial images to the Google Drive cloud. The use of this system in graphical processing in training applications is very common. Accordingly, the structure of the code has been developed based on the use of Colab, which, due to its modularity, can also be modified and used in internal GPU.
Users should open first the “prediction.ipynb” jupyter notebook on the google collab platform. Then, upload the “Dataset_JPV.zip” on the google drive. Now, it is required to import the “id” of the Dataset_JPV.zip, which has been uploaded, into the determined cell. For this purpose, find the “get shareable link” by right click on the Dataset_JPV.zip, and then, paste it into the cell, in which the dataset is extracted. This process should be performed for “my_model.h5”, which is the trained model and it is used for the prediction of test images.
Please note that the “Dataset_JPV” folder has two main sections, namely “train” and “test”. Each individual section has two folders as “x” and “y”, in which there are main aerial images of PV plants and their masks, respectively.






