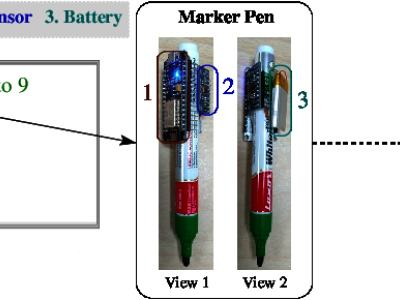
This dataset contains human motion data collected using inertial measurement units (IMUs), including accelerometer and gyroscope readings, from participants performing specific activities. The data was gathered under controlled conditions with verbal informed consent and includes diverse motion patterns that can be used for research in human activity recognition, wearable sensor applications, and machine learning algorithm development. Each sample is labeled and processed to ensure consistency, with raw and augmented data available for use.
- Categories: