*.mp4

Wearable long-term monitoring applications are becoming more and more popular in both the consumer and the medical market. In wearable ECG monitoring, the data quality depends on the properties of the electrodes and on how they contact the skin. Dry electrodes do not require any action from the user. They usually do not irritate the skin, and they provide sufficiently high-quality data for ECG monitoring purposes during low-intensity user activity. We investigated prospective motion artifact–resistant dry electrode materials for wearable ECG monitoring.
- Categories:
 160 Views
160 Views
This multimedium file demonstrates the structure of a proposed 360-degree folded spatial unipolar coil structure.
- Categories:
134 Views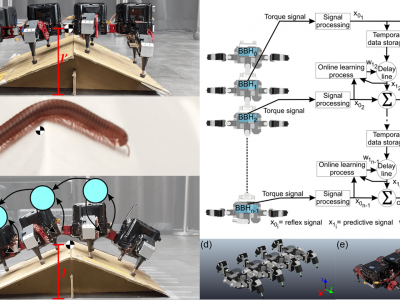
Typically, control strategies for legged robots have been developed to adapt their leg movements to deal with complex terrain. When the legs are extended in search of ground contact to support the robot body, this can result in the center of gravity (CoG) being raised higher from the ground and can lead to unstable locomotion if it deviates from the support polygon. An alternative approach is body adaptation, inspired by millipede/centipede locomotion behavior, which can result in low ground clearance and stable locomotion.
- Categories:
224 Views
Personal assistive devices for rehabilitation will be in increasing demand during the coming decades due to demographic change, i.e., an aging society. Among the elderly population, difficulty in walking is the most common problem. Even though there are commercially available lower limb exoskeleton systems, the coordination between user and device still needs to be improved to achieve versatile personalized gait. To tackle this issue, an advanced EXOskeleton framework for Versatile personalized gaIt generation with a Seamless user-exo interface (called "EXOVIS") is proposed in this study.
- Categories:
439 Views
In this study, we present advances on the development of proactive control for online individual user adaptation in a welfare robot guidance scenario, with the integration of three main modules: navigation control, visual human detection, and temporal error correlation-based neural learning. The proposed control approach can drive a mobile robot to autonomously navigate in relevant indoor environments. At the same time, it can predict human walking speed based on visual information without prior knowledge of personality and preferences (i.e., walking speed).
- Categories:
245 Views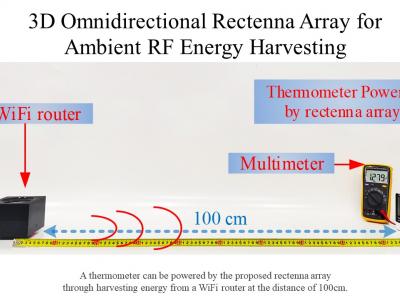
It is a video to demo a rectenna to harvest microwave power.
- Categories:
194 Views
Oral health problems are closely associated with the analysis of dental tissue changes and the stomatologic treatment that follows. The associated paper explores the use of diffuse reflectance spectroscopy in the detection of dental tissue disorders. The data set includes 78 out of 343 measurements of teeth spectra in the wavelength range from 400 to 1700 nm. The proposed methodology focuses on computational and statistical methods and the use of these methods for the classification of dental tissue into two classes (healthy and unhealthy) by estimating the probability of class membership.
- Categories:
293 Views
Astrictive-type grippers, which generate gripping forces from adhesive forces at the contact surface such as suction cup, are popular end-effectors as picking solutions because of their simplicity and small working space. However, the adhesive force of the astrictive gripper decreases with increasing complexity of the object surface; thus, its application has been restricted to simple picking of objects with a flat surface. Here, we present an all-round honeycomb astrictive gripper that has an orthotropic surface tension for grasping highly irregular shaped objects with an uneven surface.
- Categories:
253 Views
Due to the range of battery capacities in different electric vehicles (EVs), wireless power transfer (WPT) systems need to have a large variation in the output power. Since conventional systems are usually designed for a custom specification, the power and efficiency may be significantly reduced due to the need for interoperability between ground assembly and vehicle assembly with different power ratings. To address this issue this paper proposes a DC-link parallel AC-link series (DPAS) multi-inverter multi-rectifier (MIMR) architecture for high-power WPT systems.
- Categories:
113 Views
ViFoDAC is a collection of Authentic videos and Forged videos. The dataset has a total of 16 Authentic videos and 16 Forged videos. The Authentic videos are camera recorded whereas the Forged videos are edited using Adobe Premiere Pro and Wondershare Filmora software. The dataset can be used to train and optimise video identification models. This dataset can be used for the Research and Development of fake video classification.
- Categories:
963 Views