SUPPLEMENT MEDIA FOR PROACTIVE CONTROL FOR ONLINE INDIVIDUAL USER ADAPTATION IN A WELFARE ROBOT GUIDANCE SCENARIO: TOWARD SUPPORTING ELDERLY PEOPLE
- Citation Author(s):
-
Alejandro Pequeno-Zurro (SDU Biorobotics, The Maersk Mc-Kinney Moller Institute, University of Southern Denmark)Jevgeni Ignasov (SDU Biorobotics, The Maersk Mc-Kinney Moller Institute, University of Southern Denmark)Eduardo R. Ramirez (SDU Robotics, The Maersk Mc-Kinney Moller Institute, University of Southern Denmark)Frederik Haarslev (SDU Robotics, The Maersk Mc-Kinney Moller Institute, University of Southern Denmark)William K. Juel (SDU Robotics, The Maersk Mc-Kinney Moller Institute, University of Southern Denmark)Leon Bodenhagen (SDU Robotics, The Maersk Mc-Kinney Moller Institute, University of Southern Denmark)Norbert Krueger (SDU Robotics, The Maersk Mc-Kinney Moller Institute, University of Southern Denmark)Danish Shaikh (SDU Biorobotics, The Maersk Mc-Kinney Moller Institute, University of Southern Denmark)Inaki Rano (SDU Biorobotics, The Maersk Mc-Kinney Moller Institute, University of Southern Denmark)Poramate Manoonpong
 (SDU Biorobotics, The Maersk Mc-Kinney Moller Institute, University of Southern Denmark)
(SDU Biorobotics, The Maersk Mc-Kinney Moller Institute, University of Southern Denmark)
- Submitted by:
- Poramate Manoonpong
- Last updated:
- DOI:
- 10.1109/TSMC.2022.3224366
- Data Format:
- Research Article Link:
 247 views
247 views
- Categories:
- Keywords:
Abstract
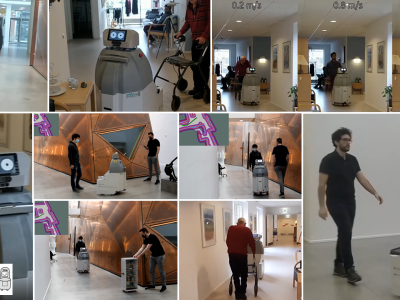
In this study, we present advances on the development of proactive control for online individual user adaptation in a welfare robot guidance scenario, with the integration of three main modules: navigation control, visual human detection, and temporal error correlation-based neural learning. The proposed control approach can drive a mobile robot to autonomously navigate in relevant indoor environments. At the same time, it can predict human walking speed based on visual information without prior knowledge of personality and preferences (i.e., walking speed). The robot then uses this prediction to continuously adapt its speed to individual users in a proactive online manner. We validate the performance of the proposed proactive robot control in different real-world environments with various users, including an elderly resident of a Danish elderly care center. The results show that the robot successfully and smoothly guided various users of different ages and average walking speeds (e.g., 0.2 m/s, 0.7 m/s, 1.1 m/s) to target locations over distances of 25-60 m. All in all, this study captures a wide range of research from robot control technology development to technological validity in a relevant environment and system prototype demonstration in an operational environment (i.e., an elderly care center).
Instructions:
Dataset Files
- The supplementary video 1 demonstrates the SMOOTH robot guiding a subject over a distance of 60 m. (Size: 17.35 MB)
- The supplementary video 2 demonstrates the SMOOTH robot successfully guiding an elderly resident at an elderly care center. (Size: 47.91 MB)
- The supplementary video 3 demonstrates another test of robot guiding an elderly resident at an elderly care center. (Size: 82.02 MB)
- The supplementary video 4 shows a comparison of the robot speed adaptation to individual users with different walking speeds. (Size: 2.8 MB)
- The supplementary video 5 demonstrates the SMOOTH robot successfully guiding a subject in a dynamic environment (situation 1). (Size: 32.33 MB)
- The supplementary video 6 demonstrates the SMOOTH robot successfully guiding a subject in a dynamic environment (situation 2). (Size: 44.93 MB)
- The supplementary video 7 demonstrates the SMOOTH robot successfully guiding a subject in a dynamic environment (situation 3). (Size: 34.46 MB)
- The supplementary video 8 demonstrates the SMOOTH robot guiding a subject over a distance of 30 m. (Size: 7.36 MB)






