.csv and text (.txt)

The digital health service market has gained higher demand, but there lacks intensive research to propose a usability design framework for the health service mobile application that caters to older adults in Malaysia. This research proposes an enhanced usability framework to support the design and development of the Malaysia health service mobile applications to serve older users.
- Categories:
 14 Views
14 Views
Decentralized Collaborative Simultaneous Localization and Mapping (C-SLAM) is essential to enable multi-robot missions in unknown environments without relying on pre-existing localization and communication infrastructure. This technology is anticipated to play a key role in the exploration of the Moon, Mars, and other planets. In this work, we introduce a novel dataset collected during C-SLAM experiments involving three robots operating on a Mars analogue terrain.
- Categories:
375 Views
The dataset samplePointsCities_20240811_harmonized.csv was used for the Rescaled Water Index (RWI) proposal, and another dataset, samplePointsCities_20250303_harmonized.csv, was used for spectral analyses.
The GitHub page (https://github.com/edujusti/Rescaled-Water-Index-RWI) contains the Python and JavaScript (Google Earth Engine) scripts used for data production, statistical analyses, and result visualization of the RWI spectral index.
- Categories:
151 Views
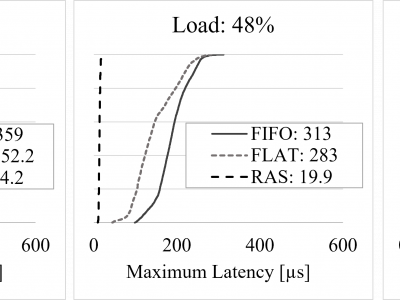
The data set was used to produce three figures (Figs. 4, 5, and 6) in the experimental section of a manuscript submitted for review to the IEEE Communications Magazine. The submission, titled Lightweight Determinism in Large-Scale Networks, describes a novel approach to the realization of network determinism in packet-switched networks of generic size and topology.
- Categories:
406 Views
In this work we present a study of micro-photoluminescence (PL) emission from a novel InGaN quantum well (QW) emitting structure with integrated micro-cavity, which can be used for VCSEL applications. The micro-cavity exhibiting Tamm plasmon optical states is formed by porous GaN distributed Bragg reflector (DBR) bottom mirror and top plasmonic silver metal mirror. Results of PL, Fourier imaging spectroscopy and finite-difference time-domain simulations are presented and discussed.
- Categories:
83 Views