Sensors
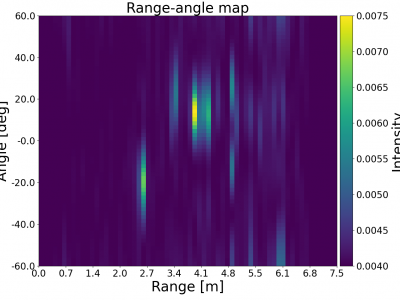
In our work, we propose an innovative system to accurately infer and track occluded target locations using mmWave beat frequency signals. Our approach combines a classic direction-finding method with advanced deep learning techniques, specifically a convolutional neural network (CNN), to enhance detection capabilities. The dataset includes raw beat frequency signal data from the TI IWR6843ISK rev B with TI mmWAVEICBOOST and the TI DCA1000EVM capture board. Corresponding ground truth data (target position) from the Realsense L515 RGB-D camera is also provided.
- Categories:
 399 Views
399 Views
This data set contains the refractive index and reflectivity, emission intensity, and absorption length data for various materials utilitised in a SiPM-based Geant4 simulation platform. This simulation platform consists of the scintillation detector SiPM-3000 from Bridgeport Instruments, which contains a scintillator optically bonded to a silicon photomultiplier (SiPM) array within the detector housing. Scintillator crystals included in this study consist of GAGG:Ce, CLLBC:Ce, BGO, NaI:Tl, and CsI:Tl.
- Categories:
317 Views
Sapphire fiber can withstand temperatures of around 2000°C, but it is multimoded, giving poor precision sensors. We have demonstrated a single-mode sapphire fiber Bragg grating temperature sensor operating up to 1200°C. A single-mode sapphire fiber was formed by writing a depressed cladding waveguide along the length of a 100-µm diameter sapphire fiber using a femtosecond laser. A second-order Bragg grating sensor was inscribed within the waveguide, achieving a reflectivity of >90% and a narrow bandwidth of <0.5 nm.
- Categories:
85 Views
Dataset of a smart insole that are used to estimating stride length. Eight participants wore a pair of smart insoles and Gait Up. For a period of six minutes, each participant walked back and forth on a predefined 20-meter pathway in the indoor setting, and the numbers of round trips and strides taken were counted. The smart insole is equipped of five pressure sensors and one 3D accelerometer. The actual total distance was calculated by multiplying the number of round trips by 40 meters.
- Categories:
200 Views
This is the dataset related to the article "Machine-learning-based Colorimetric Sensor on Smarthone for Salivary Uric Acid Detection". The dataset contains two types of images. The first type is the full-sized image captured by the sensor, which is used to evaluate the performance of the ROI detection. The second type is the reaction area from artificial saliva and clinical samples, which is used to train and test machine-learning models.
- Categories:
188 Views
AirIoT is a temporal dataset of air pollution concentration values measured for almost three years in Hyderabad, India. In AirIoT, a dense network of IoT-based PM monitoring devices equipped with low-cost sensors was deployed. The research focuses on two primary aspects: measurement and modelling. The team developed, calibrated, and deployed 50 IoT-based PM monitoring devices throughout Hyderabad, India, covering urban, semi-urban, and green areas.
- Categories:
1364 Views
This dataset consists of inertial, force, color, and LiDAR data collected from a novel sensor system. The system comprises three Inertial Measurement Units (IMUs) positioned on the waist and atop each foot, a color sensor on each outer foot, a LiDAR on the back of each shank, and a custom Force-Sensing Resistor (FSR) insole featuring 13 FSRs in each shoe. 20 participants wore this sensor system whilst performing 38 combinations of 11 activities on 9 different terrains, totaling over 7.8 hours of data.
- Categories:
366 Views
Mechanical Scanning Sonars (MSS) are popular underwater sensors for Unmanned Underwater Vehicles (UUV) due to their low cost, small size, and low power consumption. But due to their simplicity, there are also many research challenges related to their usage. Unfortunately, there is also a lack of data with ground truth UUV localization. We provide MSS datasets using a UUV with standard navigation sensors, i.e., an Inertial Measurement Unit (IMU) and a Doppler Velocity Log (DVL).
- Categories:
477 Views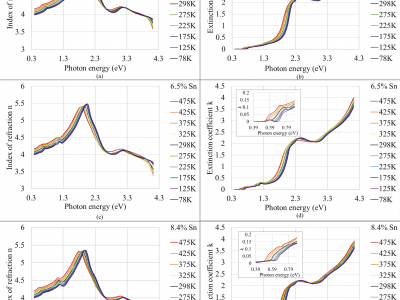
Normal 0 false false false EN-US X-NONE X-NONE /* Style Definitions */ table.MsoNormalTable {mso-style-name:"Table Normal"; mso-tstyle-rowband-size:0; mso-tstyle-colband-size:0; mso-style-noshow:yes; mso-style-priority:99; mso-style-parent:""; mso-padding-alt:0in 5.4pt 0in 5.4pt; mso-para-margin-top:0in; mso-para-margin-right:0in; mso-para-margin-bottom:8.0pt; mso-para-margin-left:0in; line-height:107%; mso-pagination:widow-orphan; font-size:11.0pt; font-family:"Aptos",sans-serif; mso-ascii-font-family:Aptos; mso-ascii-theme-font:minor-latin; mso-hansi-font-family:Aptos; mso-hansi-theme-fon
- Categories:
238 Views
This dataset consists of room impulse responses from a waste container recorded at different fill levels. The data were captured (Mic.: MAX4466) with a length of 4096 samples at a sampling rate of 10 kHz. A sine sweep was utilized between 2048 and 3072 samples. Spectral subtraction preprocessing was applied to enhance the data clarity, utilizing a 1024-sample segment recorded prior to the sine sweep. The calculated RIR begins at sample 3072. Folder names within the dataset correspond to the fill levels of the waste container.
- Categories:
12 Views