Transportation

Adverse driving conditions like darkness, rain, and fog present significant challenges to professional drivers as well as to computer vision algorithms in autonomous vehicles. One potential solution is to use an on-board system for real-time image translation, transforming weather-affected images into clear ones.
- Categories:
 8 Views
8 Views
This study presents a deep learning-based framework for detecting vehicle deceleration patterns using Ultra-Wideband (UWB) Channel Impulse Response (CIR) analysis. Unlike traditional GPS or IMU-based systems, which struggle in GPS-denied environments such as tunnels, the proposed method leverages UWB CIR signal variations to classify two key driving behaviors: rapid deceleration and gradual deceleration. All data were collected from real-world experiments using UWB devices installed on actual vehicles at a professional highway testing site.
- Categories:
19 Views
This dataset provides packet traces captured in a realistic 5G Vehicle-to-Everything (5G-V2X) environment, encompassing both legitimate vehicular communications and Distributed Denial of Service (DDoS) attacks. By deploying four user equipments (UEs) under multiple attacker configurations, the collected captures reflect various DDoS types (TCP SYN, UDP, and mixed) and reveal their impact on 5G-V2X networks. The dataset is further enriched with Argus files and CSV feature tables, facilitating data-driven approaches such as Machine Learning (ML)-based detection agents.
- Categories:
375 Views
Abstract
PassengerEEG is a brain-signal dataset designed to study how human passengers perceive and cognitively respond to potential traffic hazards in highly automated vehicles (AVs). As AVs increasingly replace human drivers, understanding passenger cognition becomes essential for improving vehicle safety and adaptive decision-making.
- Categories:
88 Views
This is a map-matching dataset, likely used for geospatial analysis and route mapping applications. The dataset is organized into multiple numbered segments, each potentially containing different routes, map regions, or tracking data.
Based on the name "map-matching-dataset" and the file structure, this dataset is probably used for developing or testing algorithms that match trajectory traces to road networks. Such datasets typically contain trajectory points, road network data, and ground truth matches for evaluation purposes.
- Categories:
12 Views
The UQTR dataset consists of 7838 real and synthetic images of the Université du Québec à Trois-Rivières (UQTR) campus road under normal and snow conditions. The image resolution is 1280×720. It includes lane labels in .txt files, where each row stores the set of points of a lane. The points are stored as x1 y1 x2 y2, as in the tutorial by Ruijin Liu, Zejian Yuan, Tie Liu, Zhiliang Xiong: Train and Test Your Custom Data.
- Categories:
217 Views
The TUROS-TS encompasses 5,357 Google Street View images with 8,775 traffic sign instances covering 9 categories and 28 classes. Three subsets of the dataset were created: test (10%-1050 images 579), validation (20% -1050 images), and training (70% - 3728 images). It is available upon request. If you want to train and test the data set. Please send an email to afef.zwidi@regim.usf.tn
- Categories:
67 Views
The Dash Cam Video Dataset is a comprehensive collection of real-world road footage captured across various Indian roads, focusing on lane conditions and traffic dynamics. Indian roads are often characterized by inconsistent lane markings, unstructured traffic flow, and frequent obstructions, making lane detection and traffic identification a challenging task for autonomous vehicle systems.
- Categories:
482 Views
The ADS-B track data, downloaded from the open Internet, contains four aircraft targets, namely B737, C17-1, C17-2, E35L, each target contains 110 complete tracks, totaling more than 100,000 track points. The data sets of 4 aircraft targets were randomly divided into training sets, verification sets and test sets according to the ratio of 8:1:1.
- Categories:
82 Views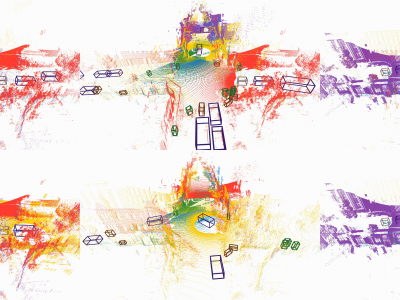
Vehicle-to-everything (V2X) collaborative perception has emerged as a promising solution to address the limitations of single-vehicle perception systems.
- Categories:
256 Views