Signal Processing
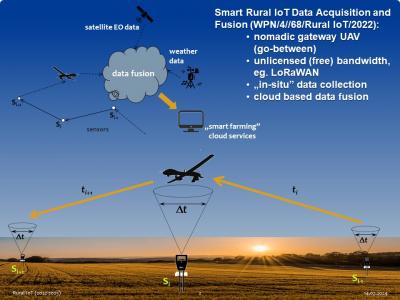
Measurement campaign was performed across the entire growing season of 2023. Seven Arduino+LoRaWAN sensors were measuring soil moisture, temperature and pH, as well as solar irradiance in the radius of about 35 km around Gdansk, Poland. Raw data were being collected with a nomadic gateway aboard an UAV and transferred to the cloud for analysis (package part A). Based on the physics informed analysis of the underlying measurement processes anomalies were classified and parametrized.
- Categories:
 713 Views
713 Views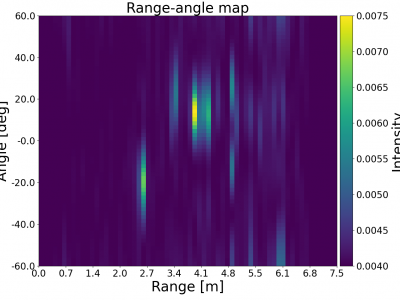
In our work, we propose an innovative system to accurately infer and track occluded target locations using mmWave beat frequency signals. Our approach combines a classic direction-finding method with advanced deep learning techniques, specifically a convolutional neural network (CNN), to enhance detection capabilities. The dataset includes raw beat frequency signal data from the TI IWR6843ISK rev B with TI mmWAVEICBOOST and the TI DCA1000EVM capture board. Corresponding ground truth data (target position) from the Realsense L515 RGB-D camera is also provided.
- Categories:
399 Views
This dataset is utilized for the research of blind identification of CPM signal modulation order. The signal parameters in the dataset range as follows: modulation index from 0.125 to 1, modulation order of 2, 4, 8, pulse types including REC, RC, SRC, TFM, and GMSK, and correlation lengths of 1 to 8. The signals are oversampled by a factor of 10, transmitted through an additive white Gaussian noise (AWGN) channel, and the signal-to-noise ratio (SNR) ranges from 0 to 30dB.
- Categories:
81 Views
This dataset contains the measurement in an ultrawide band (UWB) system in the 6.5 GHz band, considering the presence of the human body as the only obstacle. There are measurements in line-of-sight condition to compare the results of the analysis performed. The measurements are part of our research on the adverse effects of the body shadowing in pedestrian localization systems. The measurements were obtained in three distinct scenarios.
- Categories:
801 Views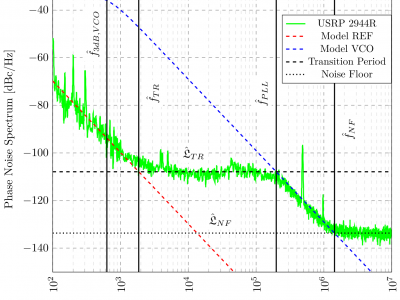
Phase noise is a common hardware impairment, resulting from the frequency instability of voltage-controlled oscillators (VCO). To improve the phase noise performance of a VCO, they are typically connected to a control circuit. This control circuit is known as phase locked loop (PLL). It is commonly used as a frequency synthesizing circuit for the carrier frequency in mobile communication transceivers. Universal Software Radio Peripherals (USRP) are widely used in mobile communication research.
- Categories:
312 Views
Modern automotive embedded systems include a large number of electronic control units (ECU) responsible for managing sophisticated systems such as engine control, ABS brake systems, traction control, and power steering systems. To ensure the reliability and effectiveness of these functions, it is essential to apply rigorous test approaches and standards. The integration of diagnostic functions in automotive embedded systems demands consistent tests and a detailed analysis of data.
- Categories:
173 Views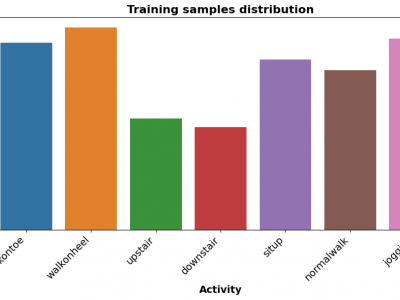
The Human Activity Recognition (HAR) dataset comprises comprehensive data collected from various human activities including walking, running, sitting, standing, and jumping. The dataset is designed to facilitate research in the field of activity recognition using machine learning and deep learning techniques. Each activity is captured through multiple sensors providing detailed temporal and spatial data points, enabling robust analysis and model training.
- Categories:
255 Views
Precise modeling of dynamical systems can be crucial for engineering applications. Traditional analytical models often struggle when capturing real-world complexities due to challenges in system nonlinearity representation and model parameter determination. Data-driven models, such as deep neural networks (DNNs), offer better accuracy and generalization but require large quantities of high-quality data.
- Categories:
159 Views
The file “marine_data.mat” is the data from the marine experiment, including data from different navigation and positioning sensors. The file “lake_data.mat” is the data from the lake experiment, including data from different navigation and positioning sensors.
The meaning and explanation for each column in the file “lake_data.mat” is shown as below:
Acc_x is the x-axis acceleration of the surface vehicle.
Acc_y is the y-axis accelerationof the surface vehicle.
- Categories:
171 Views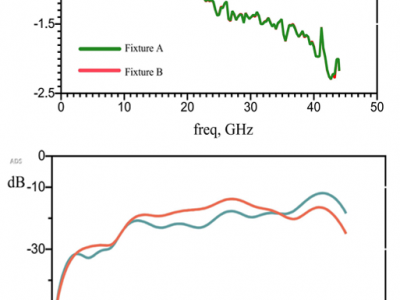
s11 and s21:hows the ADS simulation of 2X-thru, where the S2P files of fixtures A and B are introduced to observe whether fixtures A and B are symmetric. It can be seen from the insertion loss S21 and return loss S11 of the 2X-thru simulation in Fig. 5(c) that the insertion losses of fixtures A and B almost coincide, but the return loss is not completely coincident because of the discontinuous impedance of the transmission line of fixtures A and B at the connection between the coaxial connector and the PCB. In Fig.
- Categories:
153 Views