
test
- Categories:
test

Visible Light Positioning is an indoor localization technology that uses wireless transmission of visible light signals to obtain a location estimate of a mobile receiver.
This dataset can be used to validate supervised machine learning approaches in the context of Received Signal Strength Based Visible Light Positioning.
The set is acquired in an experimental setup that consists of 4 LED transmitter beacons and a photodiode as receiving element that can move in 2D.
A dataset from semiconductor assembly and testing processes is used to evaluate the model selection prediction method. The response variable refers to the throughput rate of a specific machine–product combination in one of the assembly and testing process steps based on historical data. This data set includes 1 response variable, 5 categorical machine and product attributes and 11 numerical attributes. The dataset contains 13186 observations.
Tactile perception of the material properties in real-time using tiny embedded systems is a challenging task and of grave importance for dexterous object manipulation such as robotics, prosthetics and augmented reality [1-4] . As the psychophysical dimensions of the material properties cover a wide range of percepts, embedded tactile perception systems require efficient signal feature extraction and classification techniques to process signals collected by tactile sensors in real-time.

GPS spoofing and jamming are common attacks against the UAV, however, conducting these experiments for research can be difficult in many areas. This dataset consists of a logs from simulation and live fights. Logs include data from a benign flight as well as one where the UAV experiences an attack.
Simulated Attacks
Note: This is not the most accurate of the data. We recommend using the live GPS Spoofing and Jamming data if possible.

Conveyor belts are the most widespread means of transportation for large quantities of materials in the mining sector. This dataset contains 388 images of structures with and without dirt buildup.
One can use this dataset for experimentation on classifying the dirt buildup.
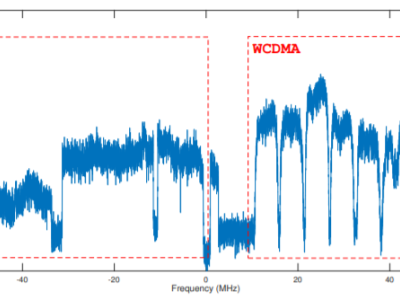
This dataset covers cellular communication signals in the SCF format. There is a total of 60000 signal instances, 36000 of them are reserved as training data and the rest is for the test. The SNR levels are between 1 dB and 15 dB.
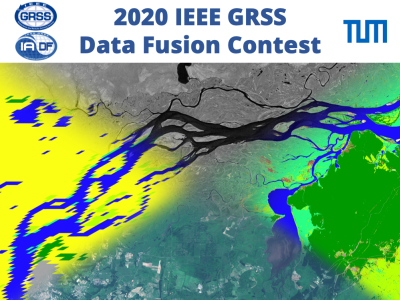
The 2020 Data Fusion Contest, organized by the Image Analysis and Data Fusion Technical Committee (IADF TC) of the IEEE Geoscience and Remote Sensing Society (GRSS) and the Technical University of Munich, aims to promote research in large-scale land cover mapping based on weakly supervised learning from globally available multimodal satellite data. The task is to train a machine learning model for global land cover mapping based on weakly annotated samples.
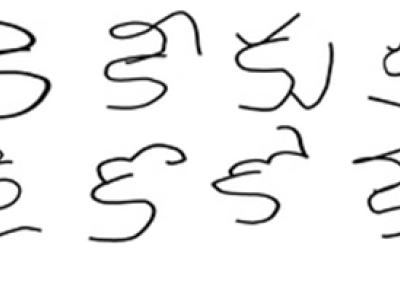
Dataset for Telugu Handwritten Gunintam
