*.csv; *.txt
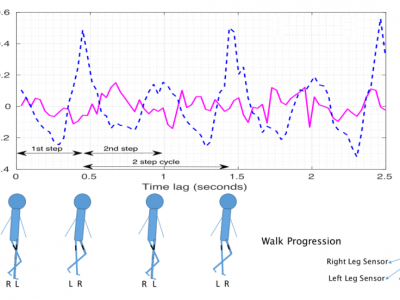
The PD-BioStampRC21 dataset provides data from a wearable sensor
accelerometry study conducted for studying activity, gait, tremor, and
other motor symptoms in individuals with Parkinson's disease (PD). In
addition to individuals with PD, the dataset also includes data for
controls that also went through the same study protocol as the PD
participants. Data were acquired using lightweight MC 10 BioStamp RC
sensors (MC 10 Inc, Lexington, MA), five of which were attached to
each participant for gathering data over a roughly two day
interval.
- Categories:
 10194 Views
10194 Views
Amidst the COVID-19 pandemic, cyberbullying has become an even more serious threat. Our work aims to investigate the viability of an automatic multiclass cyberbullying detection model that is able to classify whether a cyberbully is targeting a victim’s age, ethnicity, gender, religion, or other quality. Previous literature has not yet explored making fine-grained cyberbullying classifications of such magnitude, and existing cyberbullying datasets suffer from quite severe class imbalances.
- Categories:
4921 Views
This dataset brings some problem sets and results from some classical algorithms from the evolutionary computational community.
We have used some tools: Pymoo, Platypus and Pagmo
- Categories:
200 Views
This dataset was collected from force, current, angle (magnetic rotary encoder), and inertial sensors of the NAO humanoid robot while walking on Vinyl, Gravel, Wood, Concrete, Artificial grass, and Asphalt without a slope and while walking on Vinyl, Gravel, and Wood with a slope of 2 degrees. In total, counting all different axes and components of each sensor, we monitored 27 parameters on-board of the robot.
- Categories:
254 Views
DataSet used in learning process of the traditional technique's operation, considering different devices and scenarios, the proposed approach can adapt its response to the device in use, identifying the MAC layer protocol, perform the commutation through the protocol in use, and make the device to operate with the best possible configuration.
- Categories:
581 Views
This dataset is captured from a Mirai type botnet attack on an emulated IoT network in OpenStack. Detailed information on the dataset is depicted in the following work. Please cite it when you use this dataset for your research.
-
Kalupahana Liyanage Kushan Sudheera, Dinil Mon Divakaran, Rhishi Pratap Singh, and Mohan Gurusamy, "ADEPT: Detection and Identification of Correlated Attack-Stages in IoT Networks," in IEEE Internet of Things Journal.
- Categories:
2958 Views