First Name
Valentin
Last Name
Barral
This dataset includes FTM WiFi measurements made with several ESP32-S2 devices in different indoor and outdoor environments. The measurements include the actual distance between devices as well as the RTT (Round Trip Time) values generated by the module.
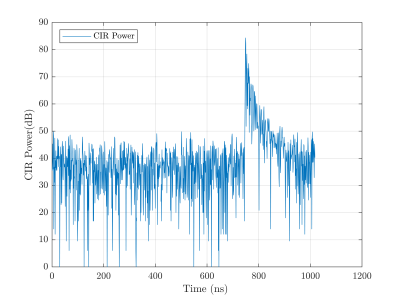
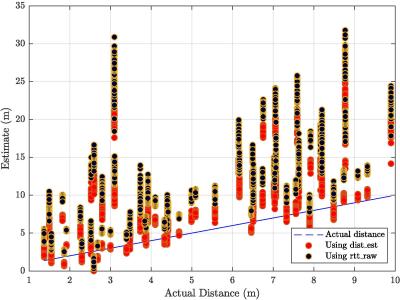
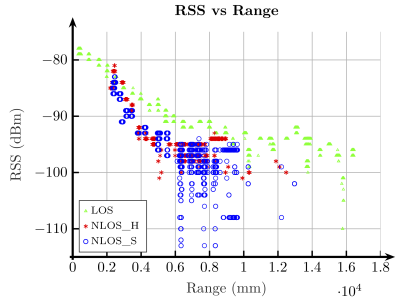
This dataset includes UWB range measurements performed with Pozyx devices. The measurements were collected between two tags placed at several distances and in two different conditions: with Line of Sight (LOS) and Non-Line of Sight (NLOS). The measurements include the range estimated by the Pozyx tag, the actual distance between devices, the timestamp of each measurement and the values corresponding to the samples of the Channel Impulse Response (CIR) after each transmission.
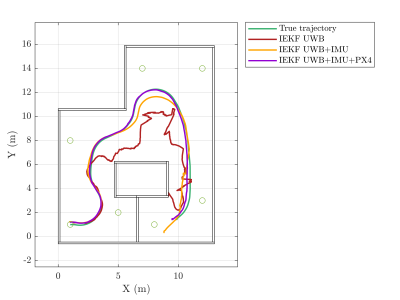
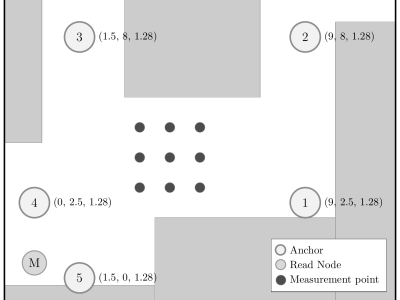
This dataset includes the measurements of a simulated vehicle inside a Gazebo simulation using different sensors: a simulated UWB tag, a IMU and a PX4Flow.
Indoor positioning systems based on radio frequency systems such as UWB inherently present multipath related phenomena. This causes ranging systems such as UWB}to lose accuracy by detecting secondary propagation paths between two devices. If a positioning algorithm uses ranging measurements without considering these phenomena, it will make important errors in estimating the position. This work analyzes the performance obtained in a localization system when combining location algorithms with machine learning techniques for a previous classification and mitigation of the propagation effects.

This repository contains ROS bags with measurements related to the article "Forklift Positioning System for Pallet Tracking in Industrial Environments". The dataset includes measurements from UWB tags, IMU, Magnetometer and Px4Flow simulated in Gazebo. Also includes the position estimations calculated using the algorithm described in the related paper.
This repository contains ROS bags with measurements related to the article "Forklift Positioning System for Pallet Tracking in Industrial Environments". The dataset includes measurements from UWB tags, IMU, Magnetometer and Px4Flow simulated in Gazebo. Also includes the position estimations calculated using the algorithm described in the related paper.