Datasets
Standard Dataset
Forklift Positioning System for Pallet Tracking in Industrial Environments

- Citation Author(s):
- Valentin Barral Vales, Pedro Suarez Casal, Carlos J. Escudero, Jose A. Garcia Naya
- Submitted by:
- Valentin Barral
- Last updated:
- Thu, 11/08/2018 - 10:34
- DOI:
- 10.21227/p6aq-er79
- Data Format:
- License:
 493 Views
493 ViewsAbstract
This repository contains ROS bags with measurements related to the article "Forklift Positioning System for Pallet Tracking in Industrial Environments". The dataset includes measurements from UWB tags, IMU, Magnetometer and Px4Flow simulated in Gazebo. Also includes the position estimations calculated using the algorithm described in the related paper.
FIles routeXX_setYY.zip contain a set of ROS bag files with data from Gazebo simulations. XX indicates the route used and YY the index of the set. Inside the zip, there are several files like:
- 2018-07-29-18-27-07.bag : The main bag, contains all the measurements from the different sensors.
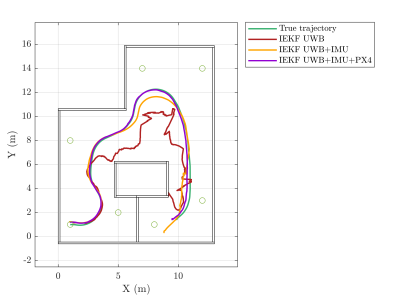
- 2018-07-29-18-27-07_u_p_a6_pos.bag : A log with positions from gazebo and positions calculated by the location algorithm, using only UWB sensors and Px4Flow.
- 2018-07-29-18-27-07_u_i_a6_pos.bag : A log with positions from gazebo and positions calculated by the location algorithm, using only UWB sensors and IMU.
- 2018-07-29-18-27-07_u_m_a6_pos.bag : A log with positions from gazebo and positions calculated by the location algorithm, using only UWB sensors and Magnetometer.
- 2018-07-29-18-27-07_u_i_m_a6_pos.bag : A log with positions from gazebo and positions calculated by the location algorithm, using only UWB sensors, IMU and Magnetometer.
- 2018-07-29-18-27-07_u_i_p_a6_pos.bag : A log with positions from gazebo and positions calculated by the location algorithm, using only UWB sensors, IMU and Px4Flow.
- 2018-07-29-18-27-07_u_m_p_a6_pos.bag : A log with positions from gazebo and positions calculated by the location algorithm, using only UWB sensors, Magnetometer, and Px4Flow.
- 2018-07-29-18-27-07_u_i_m_p_a6_pos.bag : A log with positions from gazebo and positions calculated by the location algorithm, using all the sensors.
To play a .bag file:
$ rosbag play file.bag
The .bag file contains the next topics:
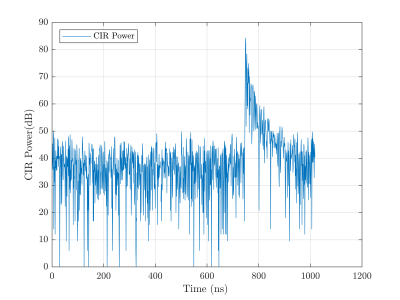
- /gtec/toa/ranging: Ranging values from UWB
- /gtec/gazebo/erle/maginterfered: Values from magnetometer.
- /imu: Data from IMU
- /gtec/gazebo/px4flow: Data from UWB sensors
- /gtec/kfpos: Positions generated by the location algotihm
- /gtec/gazebo/pos : Real positions from Gazebo.
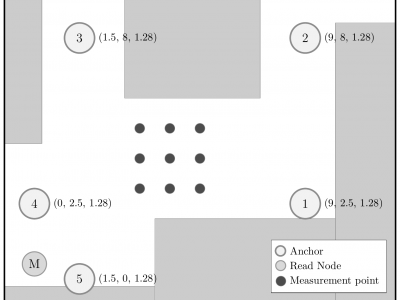
- /gtec/gazebo/anchors: Position of the anchors used in UWB