Machine Learning

This is the data for the paper "Fusion of Human Gaze and Machine Vision for Predicting Intended Locomotion Mode" published on IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2022.
- Categories:
 266 Views
266 Views
This dataset is used to illustrate an application of the "klm-based profiling and preventing security attack (klm-PPSA)" system. The klm-PPSA system is developed to profile, detect, and then prevent known and/or unknown security attacks before a user access a cloud. This dataset was created based on “a.patrik” user logical attempts scenarios when accessing his cloud resources and/or services. You will find attached the CSV file associated with the resulted dataset. The dataset contains 460 records of 13 attributes (independent and dependent variables).
- Categories:
370 Views
StEduCov, a dataset annotated for stances toward online education during the COVID-19 pandemic. StEduCov has 17,097 tweets gathered over 15 months, from March 2020 to May 2021, using Twitter API. The tweets are manually annotated into agree, disagree or neutral classes. We used a set of relevant hashtags and keywords. Specifically, we utilised a combination of hashtags, such as '#COVID 19' or '#Coronavirus' with keywords, such as 'education', 'online learning', 'distance learning' and 'remote learning'.
- Categories:
803 Views
We collect IMU measurements under three different patterns: Fixing a smartphone in front of his chest (chest), swing a smartphone while holding it in his hand (swing), and putting a smartphone in his pocket (pocket). We use Google Pixel 3XL for the pattern of chest and Google Pixel 3a for the patterns of swing and pocket. The sampling frequency of each measurement is fixed to 15Hz. We collect the measurement of 111 paths in total, categorized into 4 types. We partition them into 84 and 27 paths, used for training and testing, respectively. It takes 10 hours to collect all datasets.
- Categories:
211 Views
This dataset includes the relevant data for the journal article titled 'A Novel LSTM Pipeline to Detect Anomalies in Manufacturing Production'. In this paper, we present a novel anomaly detection method using a semi-supervised LSTM forecasting approach to highlight process anomalies in a complex, real-world dataset in an automotive manufacturing setting. This data includes two time-series subsets, each with 5000 labeled observations.
- Categories:
243 Views
Vision is important for transitions between different locomotor controllers (e.g., level-ground walking to stair ascent) by sensing the environment prior to physical interactions. Here we developed StairNet to support the development and comparison of deep learning models for visual recognition of stairs. The dataset builds on ExoNet – the largest open-source dataset of egocentric images of real-world walking environments.
- Categories:
3106 Views
Retail Gaze, a dataset for remote gaze estimation in real-world retail environments. Retail Gaze is composed of 3,922 images of individuals looking at products in a retail environment, with 12 camera capture angles.
Each image captures the third-person view of the customer and shelves. Location of the gaze point, the Bounding box of the person's head, segmentation masks of the gazed at product areas are provided as annotations.
- Categories:
663 Views
- Categories:
400 Views
This dataset is used for network anomaly detection and is based on the UGR16 dataset network traffic flows. We used June week 2 to 4 tensors generated from raw flow data to train the models. The dataset includes a set of tensors generated from the whole UGR’16 network traffic (general tensor data) and several sets of port tensors (for specific port numbers). It also includes the trained models for each type of tensor. The tensors extracted from network traffic in the period from July week 5 to the end of August can be used for evaluation. The naming convention is as follows:
- Categories:
802 Views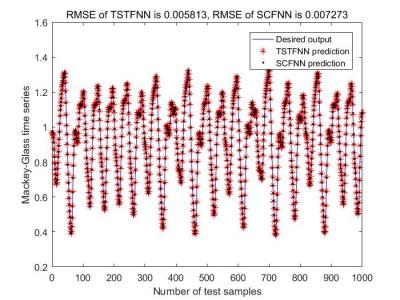
Prediction results of TSTFNN and SCFNN for Mackey-Glass time series
- Categories:
396 Views