localization

This dataset has been collected from both User Equipment (UE) and Network sides. UE side metrics consist of radio metrics that have been merged with localization information from the modem. Network side metrics consist of network Key Performance Indicators (KPI).
The dataset contains both stationary and movement samples for different approaches. Beamforming information is available from the serving and up to 3 neighbouring beams.
- Categories:
 341 Views
341 Views
This dataset contains results of the 60 GHz indoor sensing measurement campaign using a bistatic OFDM radar based on 5G-specified positioning reference signals (PRSs). The data can be used for testing end-to-end indoor millimeter-wave radio positioning as well as simultaneous localization and mapping (SLAM) algorithms, including channel parameter estimation. Beamformed PRS with dense angular sampling in transmission and reception allows efficient capture of line-of-sight (LoS) as well as multipath components.
- Categories:
2066 Views
This dataset contains the measurement in an ultrawide band (UWB) system in the 6.5 GHz band, considering the presence of the human body as the only obstacle. There are measurements in line-of-sight condition to compare the results of the analysis performed. The measurements are part of our research on the adverse effects of the body shadowing in pedestrian localization systems.
The UWB system has four fixed terminals and one mobile terminal. The mobile terminal is worn on the chest of the person.
- Categories:
199 Views
The large number and scale of natural and man-made disasters have led to an urgent demand for technologies that enhance the safety and efficiency of search and rescue teams. Semi-autonomous rescue robots are beneficial, especially when searching inaccessible terrains, or dangerous environments, such as collapsed infrastructures. For search and rescue missions in degraded visual conditions or non-line of sight scenarios, radar-based approaches may contribute to acquire valuable, and otherwise unavailable information.
- Categories:
3604 Views
This dataset includes Electromagnetic tracking streams and Bioelectric navigation streams from a phantom that are used for registration purposes. The dataset is related to the paper "Feature-Based Electromagnetic Tracking Registration Using Bioelectric Sensing".
- Categories:
52 Views
This dataset is made of the Channel Impulse Response (CIR) data collected in 9 different environments in Ghent city, Belgium. These environments include:
1. Fourth floor at iGent Tower in the premises of Gent University
2. Zwijnaarde Open Area
3. Stadhuis Street and Nearby
4. Zuid Mall
5. Portus Ganda
6. Sint-Pieters Railway Station
7. Krook library
8. Citadel Park
9. Graffiti Straat
- Categories:
648 Views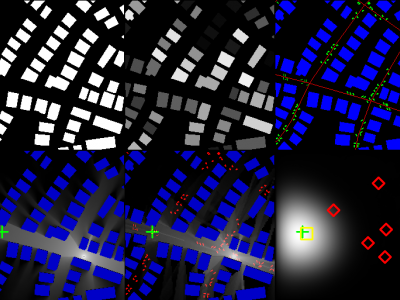
This dataset contains pathloss and ToA radio maps generated by the ray-tracing software WinProp from Altair. The dataset allows to develop and test the accuracies of pathloss radio map estimation methods and localization algorithms based on RSS or ToA in realistic urban scenarios.
- Categories:
5029 Views
Accurately obtaining the position of active transmitters within an indoor wireless network has promising applications in future wireless networks. However, due to the complex propagation phenomena experienced by signals indoors, classical model-based localization techniques present poor accuracy, and machine learning (ML) based positioning has a promising potential to deliver high accuracy localization services indoors.
- Categories:
229 Views
Extensive use of unmanned aerial vehicles (UAVs) is expected to raise privacy and security concerns among individuals and
communities. In this context, detection and localization of UAVs will be critical for maintaining safe and secure airspace in the
future. In this work, Keysight N6854A radio frequency (RF) sensors are used to detect and locate a UAV by passively monitoring
the signals emitted from the UAV. First, the Keysight sensor detects the UAV by comparing the received RF signature with various
- Categories:
1233 Views