Haptics

This dataset includes acceleration data measured by 36 participants across 154 Tactons (i.e., Tactile Icons). We used three iOS smartphones (iPhone 13 mini, iPhone 14, and iPhone 11 Pro Max) by Apple Inc. to collect acceleration data as well as sensory and emotional ratings of Tactons on various consumer phones. These phones varied in size and mass: iPhone 13 mini (64.2 x 131.5 x 7.65 mm, 141 g), iPhone 14 (71.5 x 146.7 x 7.8 mm, 172 g), and iPhone 11 Pro Max (77.8 x 158.0 x 8.1 mm, 226 g).
- Categories:
 26 Views
26 Views
Abstract— Spacesuits are essential for ensuring the safety and functionality of astronauts during space missions. However, they can introduce challenges such as sensory deprivation, reduced dexterity, and lower cognitive performance, which can increase the risk of error. In our previous research, we have shown that adding sound transparency to a suit improves cognitive scores with the block design task. Building upon these findings, here we evaluate use of electro haptics feedback in place of traditional haptics.
- Categories:
50 Views
This dataset contains data and code for the paper "Focused vibrotactile stimuli from a wearable sparse array of actuators" published in IEEE Transactions on Haptics.
- Categories:
79 Views
This dataset includes all experimental data and codes to produce figures of the paper, B. Kodak and Y. Vardar, FeelPen: A Haptic Stylus Displaying Multimodal Texture Feels on Touchscreens. IEEE/ASME Transactions on Mechatronics. 2023.
- Categories:
81 Views
This dataset contains tool-tissue interaction data from a series of partial meniscectomy punches, using an Acufex 1.5 mm upbiter punch. The data was collected from a cadaveric meniscus. The intended use of the data is haptic rendering of arthroscopic partial meniscectomy procedures.
- Categories:
74 Views
This is a dataset of 32 five-second-long vibration recordings. One human used a metal tool to perform one of two tool-mediated surface interactions (tapping or dragging) on the following four different surfaces: sandpaper (hard and rough), acrylic plastic (hard and smooth), rough paper (soft and rough), and rubber (soft and smooth). Each of the eight combinations of interaction and surface were recorded four times.
- Categories:
465 Views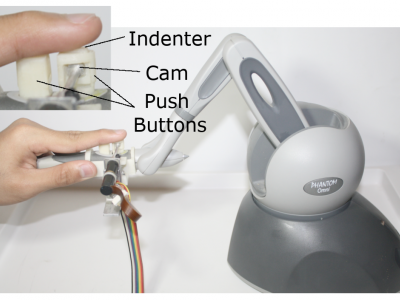
The datasets are related to the findings and results of our investigations of the minimal force thresholds perception in robotic surgical applications. The experimental setup included an indenter-based haptic device acting on the fingertip of a participant and a visual system displays grasping tasks by a surgical grasper. The experiments included the display of a set of presentations in three different modes, namely, visual-alone, haptic-alone, and bimodal (i.e., combined). Sixty participants took part in these experiments and were asked to distinguish between consecutive presentations.
- Categories:
483 Views
In robotic grasping and manipulation, force feedback is one of the most important factors. In the absence of force feedback, force control and compliant grasping is almost impossible. In this study a novel Vibrational Haptic feedback system is designed. The system gives individual digit awareness of a multipronged robotic gripper to the user. It also gives force level feedback from each fingertip and simultaneous multiple force level feedback, all through one wearable elastic “Vibrational Haptic Band (Vi-HaB)”.
- Categories:
240 Views