Signal Processing

FMFCC-A: A Challenging Mandarin Dataset for Synthetic Speech Detection
- Categories:
 257 Views
257 Views
Opportunity++ is a precisely annotated dataset designed to support AI and machine learning research focused on the multimodal perception and learning of human activities (e.g. short actions, gestures, modes of locomotion, higher-level behavior).
- Categories:
1605 Views
Based on CPU and GPU platforms, the phase detection algorithm based on GPU has been verified by measured data for several times, and the phase detection results are obtained.
The datasets are some of the main phase value information of each baseline of the rotating phase interferometer before and after gPU-based FX cross-correlation algorithm.
- Categories:
87 Views

Automotive millimeter wave Frequency Modulated Continuous Wave radars are finding widespread use in various fields. At times, the hardware specifications of commercial-off-the-shelf products prohibit the use of these products for other diverse radar measurements. More often, velocity ambiguity results when an attempt is made to measure the velocity of a high-speed target with a radar that is not designed for that purpose in the first place.
- Categories:
417 Views
Data is the database for synthetic and real field data experiments, including:ds01.mat is the synthetic data of a single-cubiod-source case which can be opened by Matlab software. ds02.mat is the synthetic data of a two-cubiod-source case which can be opened by Matlab software. ds03.csv is the real field data of the ore-concentrated area from Zhen’an, Qinling, China.
- Categories:
42 Views
The dataset consists of training and test data and label matrices for single-pixel compressive DoA estimation for mmWave metasurface. The dataset will be uploaded soon. Currently, a small part of the dataset can be accessed through this repository. For detailed information, please visit Graph Attention Network Based Single-Pixel Compressive Direction of Arrival Estimation through https://arxiv.org/abs/2109.05466
- Categories:
738 Views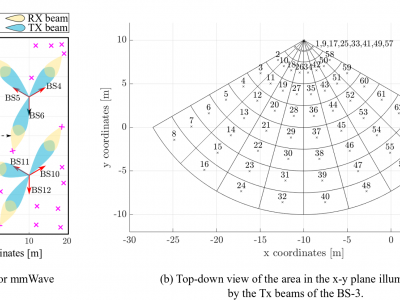
This dataset includes the measured Downlink (DL) signal-to-noise ratios (SNRs) at the User Equipments (UEs), adopting one of the beams of the beamforming codebook employed at the Base Stations (BSs). First, we configured a system-level simulator that implements the most recent Third Generation Partnership Project (3GPP) 3D Indoor channel models and the geometric blockage Model-B to simulate an indoor network deployment of BSs and UEs adopting Uniform Planar Arrays (UPAs) and a codebook based transmission.
- Categories:
663 Views
A deep sea video quality dataset with their subjective quality scores.
- Categories:
314 Views
The dataset contains the path loss measurements obtained with a LoRa (868 MHz) transmitting radio and five receivers. The receivers move in a search area covering both outdoor and indoor areas wherein a double-slope path loss is experienced. The data can be used to test range-based localization algorithm through the received signal strength.
- Categories:
499 Views