Computer Vision
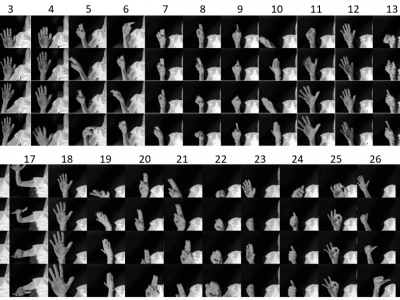
Computer vision systems are commonly used to design touch-less human-computer interfaces (HCI) based on dynamic hand gesture recognition (HGR) systems, which have a wide range of applications in several domains, such as, gaming, multimedia, automotive, home automation. However, automatic HGR is still a challenging task, mostly because of the diversity in how people perform the gestures. In addition, the number of publicly available hand gesture datasets is scarce, often the gestures are not acquired with sufficient image quality, and the gestures are not correctly performed.
- Categories:
 9679 Views
9679 Views
(Work in progress)
This dataset contains the augmented images and the images & segmentation maps for seven handwashing steps, six of which are prescirbed WHO handwashing steps.
This work is based on a sample handwashing video dataset uploaded by Kaggle user real-timeAR.
- Categories:
336 Views
We provide two folders:
(1)The shallow depth of field image data set folder consists of 27 folders from 1 to 27.
In folder 1-27, each folder contains two test images and two word files. Img1 is the shallow depth of field image with the best focusing state taken with a 300 mm long focal lens, and img2 is the overall blurred image.
- Categories:
414 Views
The network attacks are increasing both in frequency and intensity with the rapid growth of internet of things (IoT) devices. Recently, denial of service (DoS) and distributed denial of service (DDoS) attacks are reported as the most frequent attacks in IoT networks. The traditional security solutions like firewalls, intrusion detection systems, etc., are unable to detect the complex DoS and DDoS attacks since most of them filter the normal and attack traffic based upon the static predefined rules.
- Categories:
7841 Views
Liver tumor segmentation.
- Categories:
557 Views
Here we present recordings from a new high-throughput instrument to optogenetically manipulate neural activity in moving
- Categories:
367 Views
This document describes the details of the BON Egocentric vision dataset. BON denotes the initials of the locations where the dataset was collected; Barcelona (Spain); Oxford (UK); and Nairobi (Kenya). BON comprises first-person video, recorded when subjects were conducting common office activities. The preceding version of this dataset, FPV-O dataset has fewersubjects for only a single location (Barcelona). To develop a location agnostic framework, data from multiple locations and/or office settings is essential.
- Categories:
881 Views
To address the problem of online automatic inspection of drug liquid bottles in production line, an implantable visual inspection system is designed and the ensemble learning algorithm for detection is proposed based on multi-features fusion. A tunnel structure is designed for visual inspection system, which allows the bottles inspection to be automated without changing original processes and devices. A high precision method is proposed for vision detection of drug liquid bottles.
- Categories:
862 Views
Dataset asscociated with a paper in 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems
"Talk the talk and walk the walk: Dialogue-driven navigation in unknown indoor environments"
If you use this code or data, please cite the above paper.
- Categories:
242 Views
We present here an annotated thermal dataset which is linked to the dataset present in https://ieee-dataport.org/open-access/thermal-visual-paired-dataset
To our knowledge, this is the only public dataset at present, which has multi class annotation on thermal images, comprised of 5 different classes.
This database was hand annotated over a period of 130 work hours.
- Categories:
1070 Views