Image Processing

The ORSSD dataset consists of 800 optical remote sensing images with corresponding pixel-level annotations, divided into a training set of 600 images and a test set of 200 images. The EORSSD dataset is an extension of ORSSD, adding 1200 ORSIs for a total of 2000 images, and is split into 1400 training images and 600 test images. The ORSI-4199 dataset includes 2000 training images and 2199 testing images, making it the most challenging optical RSI-SOD dataset.
- Categories:
 3 Views
3 Views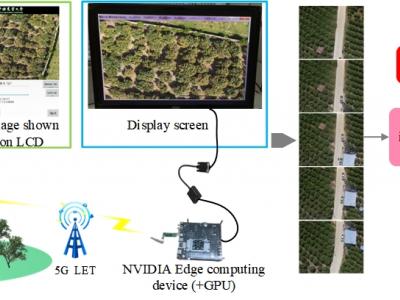
The system consists of an UAVs remote sensing system and an edge computing system. The core components of the UAVs remote sensing system mainly consist of the imaging system K510 development board and a 5G module. The K510 comes equipped with a camera and an LCD screen. The edge computing system constructed in this paper utilizes the NVIDIA Jetson series development kit, which comes with a GPU module to enhance digital image processing capabilities. The captured raw images are stitched and displayed on the NVIDIA Jetson edge computing platform using our designed improved SFIT algorithm.
- Categories:
9 Views
This dataset aims to support research on temporal segmentation of the Timed Up and Go (TUG) test using a first-person wearable camera. The data collection includes a training set of 8 participants and a test set of 60 participants. Among the 8 participants, the test was completed at both a normal walking pace and a simulated slower walking pace to mimic elderly movement patterns. The 60 participants were randomly divided into two groups: one group completed the test at a normal walking pace, and the other group simulated slower walking speed to mimic elderly movement patterns.
- Categories:
35 Views
Digital microfluidics are a unique technique for operation of nano-to-micro liter droplets based on electrowetting on dielectric. It has great application potential in the field on clinic diagnosis, life science and environment monitoring. Due to the fast droplet moving speed and high degree of freedom for droplet manipulation, it is urgent to develop automated and intelligent approaches for droplet monitoring and control.
- Categories:
37 Views
This study utilizes the open-source datasets FAIR1M and HRSC2016 as foundational resources to construct an optical remote sensing image dataset for rotated ship target detection. The dataset encompasses nine ship categories: Dry-Cargo-Ship, Engineering-Ship, Fishing-Boat, Motorboat, Tugboat, Passenger-Ship, Warship, Liquid-Cargo-Ship, and Other-Ship.
- Categories:
25 Views
Attached Image data set from combined OCT-SLO is used to train AI models and identify features to maximize quality of data set to adjust MZI reference arm, PMT Voltage of Liquid Lens and location of object. Why adjustment is needed is explained below:
- Categories:
146 Views
Hyper-spectral unmixing is a technique to estimate the abundances of different endmembers in each mixed pixel of remote sensing images. Deep learning has made significant progress in this area, offering automatic feature extraction, nonlinear pattern recognition, and end-to-end solutions. However, existing deep learning models have not fully utilized the spectral information of endmembers, leading to insufficient data mining.
- Categories:
33 Views
To investigate SAM's potential in the continual scenario, we construct a benchmark for continual segmentation, called Continual SAM Adaptation Benchmark (CoSAM), which aims to systematically evaluate SAM-related algorithms's performance in the streaming scenarios. Specifically, CoSAM offers a set of 8 tasks covering diverse domains, including industrial defects, medical imaging, and camouflaged objects, to serve as a realistic and effective benchmark for evaluating current methods.
- Categories:
18 Views
The UQTR dataset consists of 7838 real and synthetic images of the Université du Québec à Trois-Rivières (UQTR) campus road under normal and snow conditions. The image resolution is 1280×720. It includes lane labels in .txt files, where each row stores the set of points of a lane. The points are stored as x1 y1 x2 y2, as in the tutorial by Ruijin Liu, Zejian Yuan, Tie Liu, Zhiliang Xiong: Train and Test Your Custom Data.
- Categories:
207 Views
Shape completion remains a fundamental challenge in computer vision and image processing, particularly for tasks involving hand-drawn sketches and occluded objects. Traditional deep learning methods such as Generative Adversarial Networks (GANs) and Convolutional Neural Networks (CNNs) often suffer from high computational costs and poor generalization on sparse, abstract structures.
- Categories:
30 Views