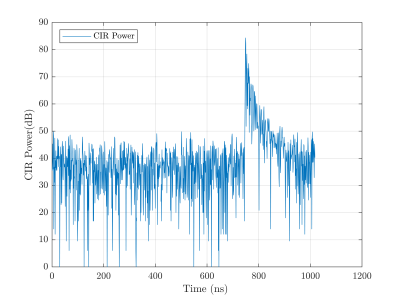
This dataset includes UWB range measurements performed with Pozyx devices. The measurements were collected between two tags placed at several distances and in two different conditions: with Line of Sight (LOS) and Non-Line of Sight (NLOS). The measurements include the range estimated by the Pozyx tag, the actual distance between devices, the timestamp of each measurement and the values corresponding to the samples of the Channel Impulse Response (CIR) after each transmission.
- Categories: