ESP32S2 FTM Measurements
- Citation Author(s):
-
Valentín Barral
 (UDC)
(UDC)
- Submitted by:
- Valentin Barral
- Last updated:
- DOI:
- 10.21227/2pv8-ze59
- Data Format:
 2750 views
2750 views
- Categories:
- Keywords:
Abstract
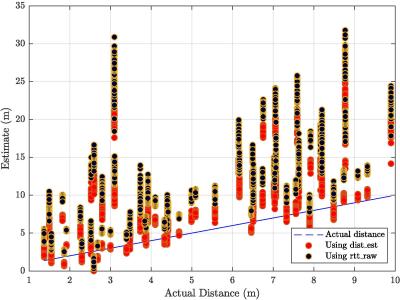
This dataset includes FTM WiFi measurements made with several ESP32-S2 devices in different indoor and outdoor environments. The measurements include the actual distance between devices as well as the RTT (Round Trip Time) values generated by the module.
Instructions:
# ESP32 S2 FTM Measurements
=========================
FTM measurements were created using several ESP32-S2 devices. They are presented in two different formats: rosbag (http://wiki.ros.org/rosbag) format and matlab format.
## ROS BAG records
The measurements can be found in the directories:
- AC
- Indoor
- Outdoor
The ROS messages are of type ESP32S2FTMRangingExtra and ESP32S2FTMRanging. These message types can be found in the following repository: https://github.com/valentinbarral/rosmsgs
The following fields are included within each message:
- anchorId: Identifier of the module that acted as beaconin the measurement.
- rtt_raw: RTT value averaged among the differentframes sent. In nanoseconds.
- rtt_est: RTT estimation created by the ESP32-S2firmware. In nanoseconds.
- dist_est: Distance estimation. Internally, the rttestvalue is used to calculate this value. In meters.
- num_frames: Number of frames successfully sent dur-ing the RTT communication.
- frames: A list of all successfully sent frames.
Each individual frame includes the following information:
- rssi: Received signal strength. In dBm.
- rtt: RTT value in that frame. In nanoseconds.
- t1: Outgoing timestamp of the first packet from thesender. In picoseconds.
- t2: Timestamp of reception of the ranging request at thereceiver. In picoseconds.
- t3: Timestamp of the response message at the receiver.In picoseconds.
- t4: Timestamp of reception of the response messagefrom the receiver at the sender. In picoseconds.
## Matlab logs
The measurements in matlab format are in the .mat file. This file includes four 1x1 struc elements:
- indoor
- outdoor20
- outdoor40
- sa
Each of these structures has the following fields:
- actualDist: Actual distance.
- rttRaw: RTT value averaged among the differentframes sent. In nanoseconds.
- estDistRaw: Distance estimate using rttRaw.
- absErrRaw: Absolute distance error of estDistRaw.
- rttEst: RTT estimation created by the ESP32-S2firmware. In nanoseconds.
- estDistEst: Distance estimate using rttEst.
- absErrEst: Absolute distance error of estDistEst.
- varRtt: variance of RTT
- meanRtt: mean of RTT
- countRtt: count of RTT
- meanRss: mean RSSI
- distEst: Distance estimate using own algorithm.
More info about this measurements can be found in the next paper (under review):
Fine Time Measurement in low-cost microprocessors for the Internet of Things