Mobile Service Robots Crash Testing with Pedestrians: Safety Assessment with Child and Adult Dummies
- Citation Author(s):
-
Diego Paez-Granados
 (EPFL)
Aude Billard
(EPFL)
(EPFL)
Aude Billard
(EPFL)
- Submitted by:
- Diego Felipe Paez Granados
- Last updated:
- DOI:
- 10.21227/yt9g-cd05
- Data Format:
- Links:
 368 views
368 views
Abstract
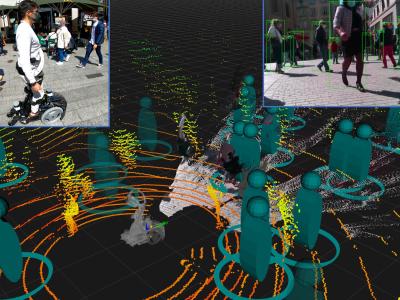
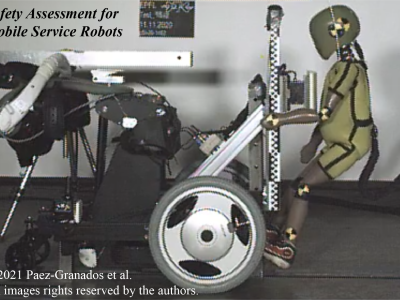
This dataset presents collisions between a service robot - Qolo - and pedestrian dummies: male adult Hybrid-III (H3) and child model 3-years-old (Q3). We present a set of collision scenarios for the assessment of pedestrian safety, considering possible impacts at the legs for adult pedestrians, and legs, chest and head for children.
In these tests, we followed known methods of safety analysis used in car crash testing and used a standing wheelchair robot "Qolo" as a representative system of mobile service robots, such as delivery bots (robot without occupant), person carrier robots, autonomous wheelchairs, standing mobility vehicles, and other transport robots expected to operate in pedestrian and public areas.
The robot was equipped with an experimental front structure allowing different bumper heights and measurement of reaction forces. On the other hand, the human dummies were equipped with standard instrumentation calibrated in accordance with SAE J211-1 for impact tests, thus, the child dummy, Q3 provided head accelerations, neck forces and moments, chest deflections, and accelerations; and pelvis accelerations. The dummy H3 provided forces and moments at the tibia and femur, and accelerations at the pelvis, chest, and head.
You will find scripts to read and plot the data, as well as, analysis of the injury risk based on standard crash testing metrics: Head Injury Criteria (HIC-15), head acceleration (a_3ms), Neck Injury (Nij), Chest deflection (CD), and tibia injury (TI).
Instructions:
This dataset contains the following main files:
- collision_test_rawdata.zip: This file contains all the raw data for each sensor as mentioned in table 3, organized in independent subfolders as described in table 2. ‘test_name’/01_values/’testName’_CFC1000.xlsx
- collision_test_analysis.zip: This file contains all the processed data for each sensor in order to apply known injury metrics (Nij, HIC15, acc_3ms, TI, CC, VCI), organized in independent subfolders as described in table 2.‘test_name’/01_values/’testName’_Analysis_v2.xlsx
- collision_data_matlab_structure.zip: Matlab containers with all data.
- scripts-crash-test-service-robots.zip: processing of the dataset is provided in this file with structure of data in Matlab containers and scripts for visualizing the data (see section III), further analysis scripts in the linked GitHub: https://github.com/epfl-lasa/crash-tests-service-robots