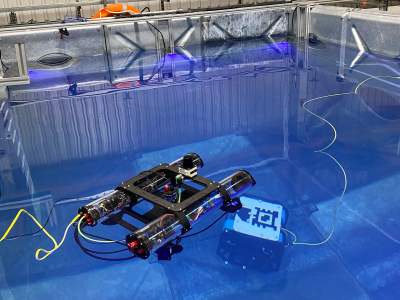
The experiments were conducted at RAICo Lab in West Cumbria. The data were real-time data collected during experiments to validate the CAP system. The underwater robot moves autonomously along three different paths, while the surface robot follows the underwater robot's movement simultaneously. The uploaded file consists of nine data sets. Three experiments were conducted for each trajectory, resulting in a total of nine datasets. The nine subsets are: Lawnmower1-3, Random1-3, and Square1-3.
- Categories: