Validation Study of Torso-Dynamics Estimation System (TES) for Hands-Free Physical Human-Robot Interaction
- Citation Author(s):
-
Seung Yun SongYixiang GuoChentai YuanNadja Marin
 Chenzhang XiaoAdam BleakneyJeannette ElliottJoao RamosElizabeth Hsiao-Wecksler
Chenzhang XiaoAdam BleakneyJeannette ElliottJoao RamosElizabeth Hsiao-Wecksler
- Submitted by:
- Nadja Marin
- Last updated:
- DOI:
- 10.21227/bve8-s715
- Data Format:
- Research Article Link:
- Links:
 121 views
121 views
- Categories:
- Keywords:
Abstract
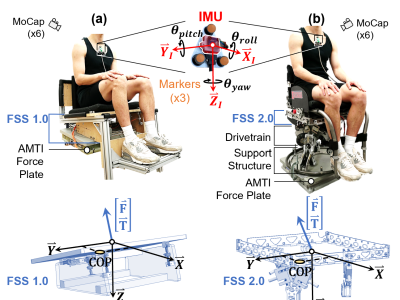
This data was collected during a validation study of our Torso-Dynamics Estimation System (TES). The TES consisted of a Force Sensing Seat (FSS) and an inertial measurement unit (IMU) that measured the kinetics and kinematics of the subject's torso motions. The FSS estimated the 3D forces, 3D moments, and 2D COPs while the IMU estimated the 3D torso angles. To validate the TES, the FSS and IMU estimates were compared to gold standard research equipment (AMTI force plate and Qualisys motion capture system, respectively).
There were two generations of the FSS, FSS Gen 1.0 and FSS Gen 2.0. This dataset contains data from the validation study of each FSS generation, so there are two different zipped folders. In each folder, there are subject data that were collected using the FSS (1.0 or 2.0), IMU, AMTI force plate, and Qualisys motion capture.
The data processing code for this study is in a GitHub repository, which can be found in the "Links" section of this DataPort.
Instructions:
See README file