Driving Smart Crane With Various Loads
- Citation Author(s):
-
Riku Ala-Laurinaho
 (Aalto University)
Tuomas Keski-Heikkilä
(Murata Electronics)
(Aalto University)
Tuomas Keski-Heikkilä
(Murata Electronics)
- Submitted by:
- Riku Ala-Laurinaho
- Last updated:
- DOI:
- 10.21227/6b9d-tr16
- Data Format:
- Research Article Link:
 364 views
364 views
- Categories:
- Keywords:
Abstract
This data set contains data collected from an overhead crane (https://doi.org/10.1109/WF-IoT.2018.8355217) OPC UA server when driving an L-shaped path with different loads (0kg, 120kg, 500kg, and 1000kg). Each driving cycle was driven with an anti-sway system activated and deactivated. Each driving cycle consisted of repeating five times the process of lifting the weight, driving from point A to point B along with the path, lowering the weight, lifting the weight, driving back to point A, and lowering the weight.
Instructions:
This folder contains a dataset where an industrial overhead crane (https://doi.org/10.1109/WF-IoT.2018.8355217)
has been driven along an L-shaped path.
Raw data folder contains unprocessed data that has been logged from the crane OPC UA server.
In the folder, data has been divided into subfolders based on the driving cycle. The descriptions of these
driving cycles can be found in the file "cycle_parameters.txt".
Each cycle subfolder contains log0-log9 folders that contain "DataLogger.csv" file with the logged data
and tagconfig.txt that is used to connect the primary keys in the csv-file into correct variables. In addition,
each cycle folder contains "CycleX_export_dataframe.csv" that includes the most important variables.
These variables are: Alarm, BridgeSpeedFeedback, HoistMotorTorque, BridgePosition, BridgeRopeAngle
BridgeMotorTorque, HoistSpeedFeedback, LoadTare, HoistPosition, TrolleyMotorTorque, TrolleySpeedFeedback
TrolleyPosition, TrolleyRopeAngle.
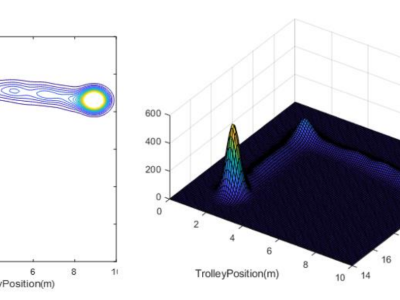
In the root folder, there are "combined.csv" file that contains the most important variables from all cycles
combined into a single file, and "route.png" is a visualization of the path driven with the crane showing the
starting point (A) and the turning point (B).