.zip (included file .mat) and matlab file

The uploaded .ZIP file contains the MATLAB codes used in Examples 1 and 2 of the following paper, which the authors have submitted to an IEEE Journal: Data-Driven Saturated State Feedback Design for Polynomial Systems Using Noisy Data. This is the abstract of the paper: "In this note, the problem of data-driven saturated state feedback design for polynomial nonlinear systems is solved by means of a sum-of-squares (SOS) approach. This new strategy combines recent results in dissipativity theory and data-driven feedback control using noisy input-state data.
- Categories:
 110 Views
110 Views
To improve the speed and direction of arrival (DOA) measurement resolution and accuracy using multiple input multiple output (MIMO) frequency modulation continuous wave (FMCW) radar, an novel algorithm based on rotation vector was proposed to expand the observation data dimensions so that higher measurement performance can be achieved. According to the phase relationship between data of each receiving channel at the serial observation time, the original data of MIMO radar can be expressed as a rotating complex vector.
- Categories:
419 Views
This text and the attached codes are related with a submitted manuscript [K. Maham, P. Kärhä, and E. Ikonen, “Spectral mismatch uncertainty estimation in solar cell calibration using Monte Carlo simulation,” (submitted)]. Various comments in the code refer to equations in this manuscript. A link to the article will be added after acceptance.
- Categories:
10 Views
Presented are the target lists of a total of 8718 measurement frames produced by three (3) radar sensors, matched together with the IMU+GNSS-RTK solution for position and motion of two (2) automobiles. The sensors are synced in respect to their measurement times, but operate independently. Their modulation is offset by a certain frequency, to ensure mono-static evaluation. This allows for a cooperative evaluation of measurements. The sensor positions are static.
- Categories:
1339 Views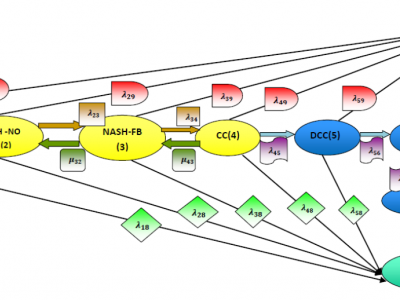
A global increase in the prevalence of obesity and type 2 diabetes is strongly connected to an increased prevalence of non-alcoholic fatty liver disease (NAFLD) worldwide. In this article, the progression of the NAFLD process is modeled by continuous time Markov chains (CTMCs) with nine states. Maximum likelihood is used to estimate the transition intensities among the states. Once the transition intensities are obtained, the mean sojourn time and its variance are estimated, and the state probability distribution and its asymptotic covariance matrix are also estimated.
- Categories:
193 Views
I tackle the problem of non-alcoholic fatty liver disease (NAFLD) from the statistical point of view. Using the multistate model, in the form of the continuous time Markov chains, helps the statistical analysis of the progression of the disease over time. The simplest model of the health-disease-death process is applied to the NAFLD. The model is composed of 8 pdfs and 5 rates that need to be estimated. Maximum likelihood and quasi-Newton methods are applied to estimate the transition rates among states.
- Categories:
167 Views
This dataset inludes a nonlinear disturbance observer (NDOB)-based controller for attitude and altitude control of a quadrotor. The NDOB is used to estimate and compensate disturbances that are imposed naturally on the quadrotor due to aerodynamics and parameter uncertainties. It is demonstrated herein that the proposed observer can estimate external disturbances asymptotically.
- Categories:
652 Views
Reliable fatigue assessment is desired in many different fields and environments. An efficient fatigue evaluation tool is promising in reducing fatal errors and economic loss in industrial settings. This dataset contains electroencephalographic (EEG) signals obtained
from an 8-channel OpenBCI headset, as well as biometric measurements obtained from the Empatica E4 wristband. Signals obtained from the E4 include: Photopletismography (PPG), heart rate, inter-beat interval (IBI), skin temperature and Electrodermic Activity
- Categories:
1368 Views
A dataset asscociated with paper “Learning-based Sparse Data Reconstruction for Compressed Data Aggregation in IoT Networks” in IEEE Internet of Things Journal. Five different structured sparse models (SSMs) are considered in the synthesized dataset, including random sparse (Sparse Model A), row sparse (Sparse Model B), row-sparse with embedded element-sparse (Sparse Model C), row-sparse plus element-spares (Sparse Model D) and block diagonal sparse (Block Sparse or group sparse).
- Categories:
312 Views
Feature tables and source code for Camargo et al. A Machine Learning Strategy for Locomotion Classification and Parameter Estimation using Fusion of Wearable Sensors. Transactions on Biomedical Engineering. 2021
- Categories:
557 Views