ply
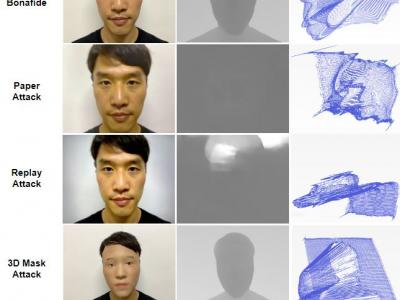
This dataset is a face dataset collected for the purpose of a face anti-spoofing study.
- Categories:
 207 Views
207 Views
During Printed Circuit Board (PCB) manufacturing, it is critical to dispense the correct amount of conductive glue on the substrate LCP surface before die attachment, as the dispensing of excessive or insufficient glue may cause defects through short circuits or weak die bonding. Therefore it is critical to monitor the amount of the dispensed glue during production.
- Categories:
501 Views
[NEW] Urb3DCD V2 is now avalaible!
- Categories:
3657 Views
DATA PROVIDED PRIOR TO ACCEPTANCE OF THE ASSOCIATED MANUSCRIPT.
This dataset contains video sequences and stereo reconstruction results supporting the IEEE Access contribution "Stereo laryngoscopic impact site prediction for droplet-based stimulation of the laryngeal adductor reflex" (J. F. Fast et al.).
See readme file for further information.
- Categories:
299 Views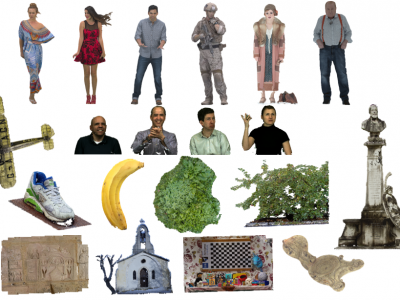
We focus on subjective and objective Point Cloud Quality Assessment (PCQA) in an immersive environment and study the effect of geometry and texture attributes in compression distortion. Using a Head-Mounted Display (HMD) with six degrees of freedom, we establish a subjective PCQA database named SIAT Point Cloud Quality Database (SIAT-PCQD). Our database consists of 340 distorted point clouds compressed by the MPEG point cloud encoder with the combination of 20 sequences and 17 pairs of geometry and texture quantization parameters.
- Categories:
730 Views
This dataset presents results of the Molecular Sombrero method, which simplifies protein cavities into an abstract, hat-like shape.
- Categories:
108 Views