Artificial Intelligence

This project contains data from four datasets used in the experiments of the paper: LIS, ExDark, ACDC, and DarkFace.
- Categories:
 13 Views
13 Views
The Dash Cam Video Dataset is a comprehensive collection of real-world road footage captured across various Indian roads, focusing on lane conditions and traffic dynamics. Indian roads are often characterized by inconsistent lane markings, unstructured traffic flow, and frequent obstructions, making lane detection and traffic identification a challenging task for autonomous vehicle systems.
- Categories:
419 Views
Bananas are widely farmed and consumed, offering essential nutrients like manganese, vitamin B6, vitamin C, and magnesium. They come in various breeds with distinct visual traits, including size, shape, color, texture, and skin patterns. To classify these varieties, five deep learning models—VGG16, ResNet50, MobileNet, Inception-v3, and a customized CNN—were trained on banana images. These models enhance quality control and supply chain management by accurately identifying banana breeds.
- Categories:
135 Views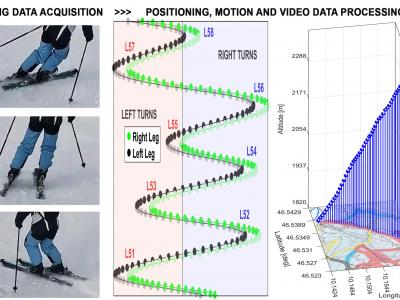
The integration of wearable sensors with artificial intelligence forms the base for analyzing physical activities through digital signal processing, numerical methods, and machine learning. Computational intelligence and communication technologies enable personalized monitoring, training, and rehabilitation, with applications in sports, neurology, and biomedicine. This paper focuses on motion analysis in alpine skiing using real accelerometric, gyroscopic, positioning, and video data to evaluate ski movement patterns.
- Categories:
159 Views
We construct the Thyroid Nodule Ultrasound (TNUS) dataset with thyroid nodule positions and puncture annotations, lacking in existing datasets. It supports future research in automating detection and diagnosis, enhancing diagnostic accuracy and clinical applications. The TNUS dataset is a curated collection of thyroid nodule ultrasound (US) images designed to support research in puncture position detection and nodule segmentation. It contains 4,376 images with puncture position annotations and 2,626 additional images with thyroid/nodule masks.
- Categories:
124 Views
ÛThis article examines Meta-AI's sociolinguistic challenges on WhatsApp through research-based analysis of its limitations in adapting lexicon and precise ethical practices in intercultural communication. The study demonstrates how Meta-AI system fails to read truncated vernacular speech patterns (“kenapa” → “enapa”) while missing customized slang (“puki”) used specifically in Maluku, North Maluku and East Nusa Tenggara regions to show fundamental limitations in error recognition capabilities and contextual understanding.
- Categories:
107 Views
The BNS (Bharatiya Nyay Sanhita) dataset is a comprehensive collection of legal texts which was web-scraped.. It consists of chapters and their respective sections, capturing detailed legal content relevant to the recently introduced BNS framework in India. This dataset was gathered using a Python-based web scraping script leveraging Selenium WebDriver, ensuring accuracy and completeness. Available in CSV formats, the dataset facilitates ease of access for legal research, natural language processing (NLP) tasks, and AI-based legal assistance applications.
- Categories:
95 Views
This is the patent data we collected from USTPO. Its part of the paper that we used for our study. It contains patent data regarding financial, assistive, and artificial intelligence technology convergence. These patents are all registered in USPTO (united states patent and trademark office) from 2001 to 2020. These data were used for network analysis. Further details will be uploaded after paper acception.
- Categories:
8 Views
Dataset was created for the purposes of exploring time distortion with non-ideal near-field conditions. A 90 Hz square wave is played at 100dBA through a bookshelf speaker with the port removed. The recordings were captured at 5 separate axial distances (From 2" to 17", following inverse square law), and at three levels of resistive loading (No added resistance, 1.5 ohm, 3 ohm). The DC resistance of the speaker was measured at 6.9 ohms. To avoid overtraining, captures were recorded on a moving dynamic microphone.
- Categories:
13 Views
Integrating multiple (sub-)systems is essential to create advanced Information Systems. Difficulties mainly arise when integrating dynamic environments, e.g., the integration at design time of not yet existing services. This has been traditionally addressed using a registry that provides the API documentation of the endpoints.
- Categories:
19 Views