*.jpg; *.json

A dataset has been created by recoloring three existing datasets: NeRF Synthetic, LLFF, and Mip 360. The recoloring was performed to provide ground truth for validating recoloring applications. NeRF Synthetic was recolored using Blender, while LLFF and Mip 360 were processed in Photoshop. For each scene in the datasets, 11 images were recolored, ensuring consistency across the datasets.
- Categories:
 81 Views
81 ViewsWe develope a novel TCM hallucination detection dataset, Hallu-TCM, sine no prior work has attempted this task in TM. We selected 1,260 TCM exam questions including 16 TCM subjects, input them into GPT-4, and collected their feedback. In the first level, we utilize Qwen-Max interface to annotate feedback multiple times with the binary label. If Qwen-Max consistently provided the same label across annotations, we adopted that label. For contentious cases, we recruited higher-degree research students who can understand and solve complex questions, including three Ph.D.
- Categories:
189 Views
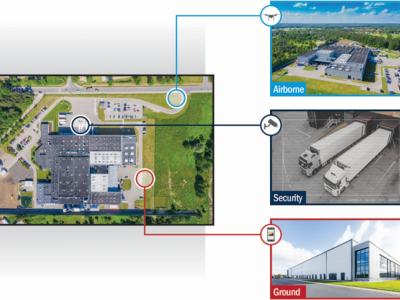
This dataset, mentioned in paper "MS2A: Memory Storage-to-Adaptation for Cross-domain Few-annotation Object Detection" and prepared for Cross-domain Few-annotation Object Detection task, consists of two cross-domain scenarios: Indus-S to Indus-T1 and Indus-S to Indus-T2. In detail, Indus-S consists of 4614 images for training and 1153 images for validation; Indus-T1 and Indus-T2 have 269 and 432 images for validation respectively. For the training data of Indus-T1 and Indus-T2, we introduce three different settings: 10-anno, 30-anno and 50-anno.
- Categories:
108 Views
In the current field of multi-view polarization 3D reconstruction, existing datasets primarily fall into two categories: real-world dataset and synthetic dataset. Real-world datasets provide accurate acquisition of illumination from real-world environments, but requires complex setups and specialized equipment such as polarization cameras. Furthermore, specific environmental conditions, such as special lighting conditions or reflective properties, may be difficult to replicate precisely in reality.
- Categories:
381 Views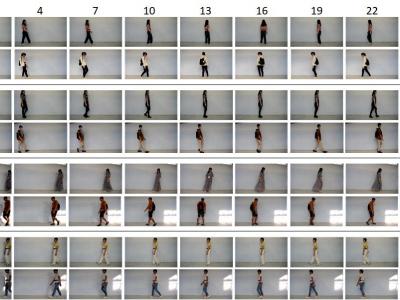
The dataset, Pedestrians with IMU (Ped-IMU), contains pedestrians moving in different behaviors while carrying a wearable sensor. We use a smartphone mounted on a subject's waist as a wearable device and record the smartphone's accelerometer, gyroscope, and magnetometer readings. We invite ten subjects of ages 22-35 to perform walking around with 4 trajectories: Left-Turn Back (L-TB), Left-Go Straight (L-GS), Right-Turn Back (R-TB), and Right-Go Straight (R-GS). A camera is set with screen ratio 16:9, resolution 1920*1080 pixels, and 12 fps.
- Categories:
351 Views