surgical robotics

Quantifying performance of methods for tracking and mapping tissue in endoscopic environments is essential for enabling image guidance and automation of medical interventions and surgery. Datasets developed so far either use rigid environments, visible markers, or require annotators to label salient points in videos after collection. These are respectively: not general, visible to algorithms, or costly and error-prone. We introduce a novel labeling methodology along with a dataset that uses said methodology, Surgical Tattoos in Infrared (STIR).
- Categories:
 2403 Views
2403 Views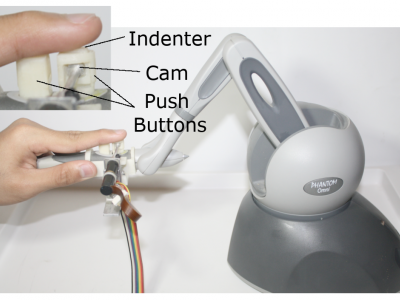
The datasets are related to the findings and results of our investigations of the minimal force thresholds perception in robotic surgical applications. The experimental setup included an indenter-based haptic device acting on the fingertip of a participant and a visual system displays grasping tasks by a surgical grasper. The experiments included the display of a set of presentations in three different modes, namely, visual-alone, haptic-alone, and bimodal (i.e., combined). Sixty participants took part in these experiments and were asked to distinguish between consecutive presentations.
- Categories:
480 Views
This dataset contains segmented data of nine human knees. For each of the knees, the surfaces (vertices and faces) of the following structures are provided: femur, tibia, fibula, patella, and the contrast solution that was injected into the knee joint representing the volume that is available for the manipulation of surgical instruments.
- Categories:
409 Views