*.csv; *.mp4

General video captioning datasets are not suitable for challenges of fast moving camera, highly overlapping vocabulary and caption for camera-carrier in driving scenes. To address this issue, we develop the Traffic Scenarios Event Caption (TSEC) Dataset to describe the key events of ego vehicle, road environment and other traffic participants. To acquire diverse types of traffic scenarios, we select the videos that we take with our on-board camera and other public dataset videos. We also download from BiliBili and Youtube to get the traffic accident videos.
- Categories:
 178 Views
178 Views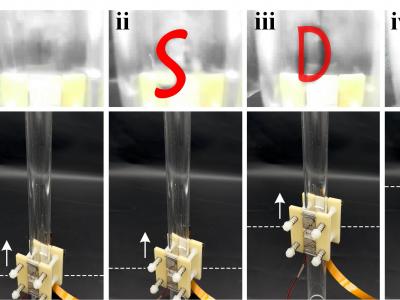
Normal 0 0 2 false false false EN-US JA X-NONE /* Style Definitions */ table.MsoNormalTable {mso-style-name:標準の表; mso-tstyle-rowband-size:0; mso-tstyle-colband-size:0; mso-style-noshow:yes; mso-style-priority:99; mso-style-parent:""; mso-padding-alt:0mm 5.4pt 0mm 5.4pt; mso-para-margin:0mm; mso-pagination:widow-orphan; font-size:10.5pt; mso-bidi-font-size:11.0pt; font-family:"游明朝",serif; mso-ascii-font-family:游明朝; mso-ascii-theme-font:minor-latin; mso-fareast-font-family:游明朝; mso-fareast-theme-font:minor-fareast; mso-hansi-font-family:游明朝; mso-hansi-theme-font:minor-latin; mso-font-kerning:
- Categories:
464 Views
Normal
0
0
2
false
false
false
EN-US
JA
X-NONE
/* Style Definitions */
table.MsoNormalTable
{mso-style-name:標準の表;
mso-tstyle-rowband-size:0;
mso-tstyle-colband-size:0;
mso-style-noshow:yes;
mso-style-priority:99;
mso-style-parent:"";
mso-padding-alt:0mm 5.4pt 0mm 5.4pt;
mso-para-margin:0mm;
mso-pagination:widow-orphan;
font-size:10.0pt;
font-family:"Times New Roman",serif;
mso-fareast-language:EN-US;}
- Categories:
394 ViewsThis work presents a new labeled dataset of videos with native and professional interpreters articulating words and expressions in Libras (Brazilian Sign Language). We used a methodology based on related studies, the support of the team of articulators, and the existing datasets in the literature.
- Categories:
795 Views
An untethered ultrasonic robot (U2sonobot) operating in resonant vibration is developed by integrating dual transducers, an onboard circuit, and a battery. Here, the longitudinal and bending vibrations lead to the out-of-phase swing motion and the alternating acceleration, respectively; these imitate the rotatory galloping gait in terms of the driving feet’s movement pattern and the operating sequence. First, the transducers were designed to gather the resonant frequencies of two vibrations and produce the same node for steadily supporting the other components.
- Categories:
87 Views
Human-robot interaction remains a significant challenge for mobile robots performing as social robots, which are expected to coexist, collaborate, and be cognitive with persons to enhance efficiency and reduce labor strength. Typically, escort robots can be widely employed for accompanying elderly and youth outdoors, guiding visitors in exhibition halls and museums, and sorting goods in warehouses.
- Categories:
324 Views
Loss of hand function severely impacts the independence of people with spinal cord injuries (SCI) between C5 and C7. To achieve limited grasps or strengthen grip around small objects, these individuals commonly employ a compensatory technique to passively induce finger flexion by extending their wrist. Passive body-powered devices using wrist-driven actuation have been developed to assist this function, in addition to advancements in active robotic devices aimed at finger articulation for dexterous manipulation.
- Categories:
37 Views