Human-escorting experiments in a warehouse with multiple persons
- Citation Author(s):
-
Hanchen Yao
 (Fujian Institute of Research on the Structure of Matter, Chinese Academy of Sciences)
(Fujian Institute of Research on the Structure of Matter, Chinese Academy of Sciences)
- Submitted by:
- Hanchen Yao
- Last updated:
- DOI:
- 10.21227/25hq-vh98
- Data Format:
- Research Article Link:
- Links:
 327 views
327 views
- Categories:
- Keywords:
Abstract
Human-robot interaction remains a significant challenge for mobile robots performing as social robots, which are expected to coexist, collaborate, and be cognitive with persons to enhance efficiency and reduce labor strength. Typically, escort robots can be widely employed for accompanying elderly and youth outdoors, guiding visitors in exhibition halls and museums, and sorting goods in warehouses.
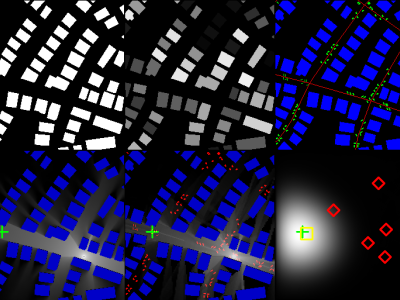
- In this dataset, the trajectories of the robot, the trajectories of the robot, the target, and four volunteers playing the role of dynamic obstacles were recorded by a VICON motion capture system.
- The position and the attitude of the robot and the target were recorded in real time by the wireless electromagnetic (WEM).
- The color information of obstacles and targets was recorded by the first view of the camera mounted on the robot.
Instructions:
Human-escorting experiments in a warehouse with multiple persons
If you have any questions please contact: hanchen_yao@126.com
==========================================
1.bag-----------------------------------rosbag file
1_usb_cam_image_raw.mp4-----------video from RGB-D camera mounted on robot
1-human.xls----------------------------time, id, translationxyz, rotationxyz, humanxy
1-monitor.xls---------------------------wireless electromagnetic tracking data
1-obstacle1.xls--------------------------time, id, translationxyz, rotationxyz, humanxy
1-obstacle2.xls--------------------------time, id, translationxyz, rotationxyz, humanxy
1-obstacle3.xls--------------------------time, id, translationxyz, rotationxyz, humanxy
1-obstacle4.xls--------------------------time, id, translationxyz, rotationxyz, humanxy
1-odom.xls------------------------------odometer data





The rosbag file "1.bag" cannot be found in the ZIP archive.