LiDAR Point Cloud
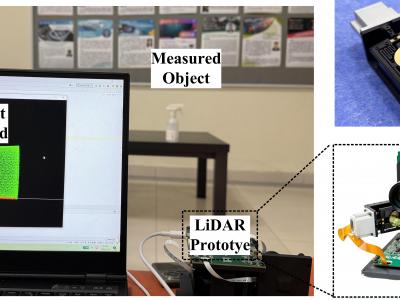
This work introduces a breakthrough two-axis electromagnetic scanning micromirror system that resolves the fundamental aperture-frequency trade-off in MEMS-based LiDAR, achieving 20 mm optical aperture with 610 Hz resonant frequency. The design seamlessly integrates a voice coil motor (VCM) for vertical actuation with a resonant horizontal scanner.
- Categories:
 32 Views
32 Views
These are 3D contours from LiDAR point cloud of Las Vegas. The QL-1 datasets (≤10cm vertical/≤35cm horizontal accuracy, ≥8 points/m²) required preprocessing due to excessive data volume (142GB for Santa Clara alone). Our method reduces data while preserving structurally critical line features for satellite image-LiDAR point cloud registration, focusing on building contours rather than less prominent road edges. First, building footprints were extracted using Google's 2D shape vectors instead of raw segmentation or classification.
- Categories:
9 Views
The SDUITC database is a multi-modal resourse developed at the Shandong Cooperative Vehicle-Infrastructure Test Base, which uses roadside cameras and LiDAR to monitor road targets and collect point cloud information. Following ground segmentation (target point cloud extraction), target identification and tracking, and feature extraction, the target point cloud information is refined and summarized into the following content: 1. Video snapshot of the captured target; 2. Point cloud clustering information for the target; 3. Feature tables.
- Categories:
117 Views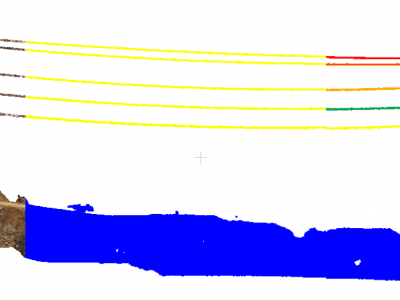
The PID is collected by small unmanned aerial vehicles equipped with LiDAR.
- Categories:
219 Views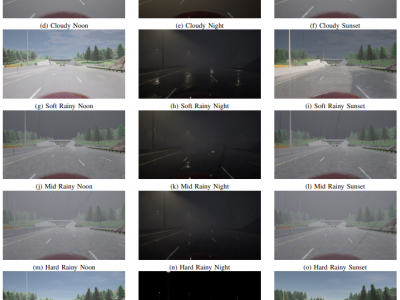
Safety of the Intended Functionality (SOTIF) addresses sensor performance limitations and deep learning-based object detection insufficiencies to ensure the intended functionality of Automated Driving Systems (ADS). This paper presents a methodology examining the adaptability and performance evaluation of the 3D object detection methods on a LiDAR point cloud dataset generated by simulating a SOTIF-related Use Case.
- Categories:
102 Views
Description
This data set contains 100,000 pcd files taken by LiDAR, a 3-D image sensor, of a vehicle orbiting an indoor field.
Data Acquisition
The indoor field was built as a 1/60 scale model of an intersection, where two vehicles kept moving along pre-fixed tracks independently of each other.
The size of the vehicles was 0.040 m × 0.035 m × 0.240 m
We captured the indoor field by two LiDAR sensor units, which was commercialized by Velodyne.
- Categories:
1472 Views
LiDAR point cloud data serves as an machine vision alternative other than image. Its advantages when compared to image and video includes depth estimation and distance measruement. Low-density LiDAR point cloud data can be used to achieve navigation, obstacle detection and obstacle avoidance for mobile robots. autonomous vehicle and drones. In this metadata, we scanned over 1200 objects and classified it into 4 groups of object namely, human, cars, motorcyclist.
- Categories:
925 Views