LiDAR Point Cloud Object Classification
- Citation Author(s):
-
Muhammad Rabani Mohd RomlayAzhar Mohd IbrahimSiti Fauziah Toha
- Submitted by:
- Muhammad Rabani Mohd Romlay
- Last updated:
- DOI:
- 10.21227/f61n-5e90
- Data Format:
 953 views
953 views
- Categories:
- Keywords:
Abstract
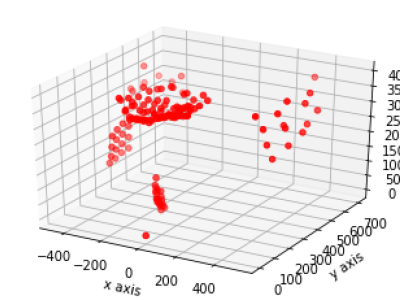
LiDAR point cloud data serves as an machine vision alternative other than image. Its advantages when compared to image and video includes depth estimation and distance measruement. Low-density LiDAR point cloud data can be used to achieve navigation, obstacle detection and obstacle avoidance for mobile robots. autonomous vehicle and drones. In this metadata, we scanned over 1200 objects and classified it into 4 groups of object namely, human, cars, motorcyclist. We also recorded the objects orientation heading for single image orientation detection which enables movement forecast and estimation.
Instructions:
These data includes 1200 scans of LiDAR point cloud from human, motorcyclist and cars.
For each object, there are 4 types of orientation namely front, back left and right side.
Data taken using LiDAR Lite V3