IMU

This is a random subset of FAST data from June 2024. The data has undergone coordinate system transformation and downsampling processing, with a frequency of 1 Hz (The original data includes IMU data from the FAST feed cabin platform sampled at 400 Hz and theoretical trajectory data calculated by the FAST Observatory, both sampled at 1 Hz).
- Categories:
 11 Views
11 Views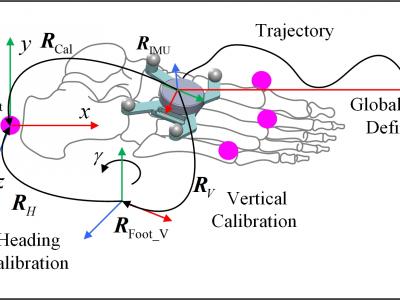
Knee osteoarthritis (KOA) is a common joint disease, causing pain, stiffness and other motor disorders. Gait analysis is an important basis for understanding the causes and formulating personalized rehabilitation plans. Although optical motion capture is regarded as the gold standard for measurement, it has drawbacks such as high cost and being limited to laboratories.
- Categories:
119 Views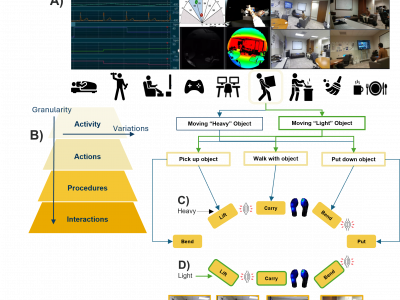
The DARai dataset is a comprehensive multimodal multi-view collection designed to capture daily activities in diverse indoor environments. This dataset incorporates 20 heterogeneous modalities, including environmental sensors, biomechanical measures, and physiological signals, providing a detailed view of human interactions with their surroundings. The recorded activities cover a wide range, such as office work, household chores, personal care, and leisure activities, all set within realistic contexts.
- Categories:
836 Views
IMUs have gained popularity for tracking joint kinematics due to their portability and versatility. However, challenges such as limited accuracy, lack of real-time data analysis, and complex sensor-to-segment calibration procedures have hindered their widespread use. To address these limitations, we developed a portable system that integrates four IMUs to collect treadmill walking data, with ground truth values obtained from a Motion Capture System.
- Categories:
137 Views
This dataset provides the magneto-inertial signals from six MIMU (2 Xsens, 2 APDM, 2 Shimmer) and orientation from 8 reflective markers (VICON) at 3 different speeds (slow, medium, fast). Marker trajectories are provided. Proprietary orientations from MIMU vendors are also included. All data are synchronized at 100 Hz.
- Categories:
1935 Views
These CSV files contain the wearable sensor data (RIP and IMU )collected from forty subjects during multiple cigarette smoking sessions.
- Categories:
608 Views
These datasets are of the hydraulically actuated robot HyQ’s proprioceptive sensors. They include absolute and relative encoders, force and torque sensors, and MEMS-based and fibre optic-based inertial measurement units (IMUs). Additionally, a motion capture system recorded the ground truth data with millimetre accuracy. In the datasets HyQ was manually controlled to trot in place or move around the laboratory. The sequence includes: forward and backwards motion, side-to-side motion, zig-zags, yaw motion, and a mix of linear and yaw motion.
- Categories:
1761 Views