FMCW radar

This dataset contains raw FMCW radar signals collected for human localization and activity monitoring in indoor environments. The data was recorded using mmWave radar sensors across two different laboratory settings, designed to simulate real-life scenarios for human detection and localization tasks.
- Categories:
 70 Views
70 Views
This dataset contains raw FMCW radar signals collected for human localization and activity monitoring in indoor environments. The data was recorded using mmWave radar sensors across two different laboratory settings, designed to simulate real-life scenarios for human detection and localization tasks.
- Categories:
186 Views
This dataset contains raw FMCW radar signals collected for human localization and activity monitoring in indoor environments. The data was recorded using mmWave radar sensors across two different laboratory settings, designed to simulate real-life scenarios for human detection and localization tasks.
- Categories:
104 Views
This dataset contains raw FMCW radar signals collected for human localization and activity monitoring in indoor environments. The data was recorded using mmWave radar sensors across two different laboratory settings, designed to simulate real-life scenarios for human detection and localization tasks.
- Categories:
111 Views
This paper proposes a novel Recursive Convolutional Target Detector (RCTD) for Frequency-Modulated Continuous-Wave (FMCW) radar in complex automotive scenarios. Leveraging a lightweight convolutional neural network, RCTD efficiently localizes multiple targets despite strong interference. Detailed simulations and a hardware prototype on an FPGA-based deep learning processor demonstrate real-time feasibility, low false alarm rates, and higher detection accuracy under stringent resource constraints.
- Categories:
37 Views
The results are based on the measurements conducted on small drones and a bionic bird using a 60 GHz millimeter wave radar, analyzing their micro-Doppler characteristics in both time and frequency domain. The results are presented in .pkl format. The more detailed description of the data and how the authors processed it will be updated soon.
- Categories:
1722 Views
For gesture recognition, radar sensors provide a unique alternative to other input devices, such as cameras or motion sensors. They combine a low sensitivity to lighting conditions, an ability to see through surfaces, and user privacy preservation, with a small form factor and low power usage. However, radar signals can be noisy, complex to analyze, and do not transpose from one radar to another.
- Categories:
659 Views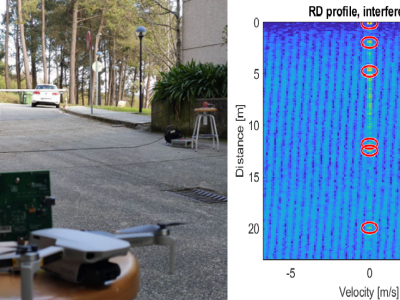
In the attached dataset, a continuous record of 2493 chirp-sequence FMCW radar burst is presented. The data consist of the direct ADC output of an AWR1443BOOST radar board from Texas Instruments during 47.37 s of continuous operation. During this time, two FMCW radars of the model AWR1642BOOST were continuously transmitting sweeps with its main lobe aimed towards the first radar. This produces the apparition of two different uncorrelated interferences at the victim radar side, which can be seen on different indexes of the provided capture.
- Categories:
1929 Views
The development in the automation sector and aircraft design has enabled enormous innovations in the urban aviation sector, which includes Advanced Air Mobility (AAM). AAM includes the on-demand air transportation of goods and passengers using the drone between aerodromes within Air Corridors. Air Corridors are an integral part of AAM, a performance-based controlled airspace where drones follow a specific set of protocols. This includes appointing the Skylane, route availability, traffic control, collision avoidance, etc.
- Categories:
380 Views
The dataset contains 4600 samples of 12 different hand-movement gestures. Data were collected from four different people using the FMCW AWR1642 radar. Each sample is saved as a CSV file associated with its gesture type.
- Categories:
4623 Views