Assistive Technology

Dataset for validation of a new magnetic field-based wearable breathing sensor (MAG), which uses the movement of the chest wall as a surrogate measure of respiratory activity. Based on the principle of variation in magnetic field strength with the distance from the source, this system explores Hall effect sensing, paired with a permanent magnet, embedded in a chest strap.
- Categories:
 532 Views
532 Views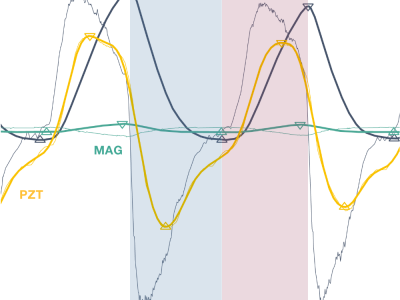
Dataset for validation of a new magnetic field-based wearable breathing sensor (MAG), which uses the movement of the chest wall as a surrogate measure of respiratory activity. Based on the principle of variation in magnetic field strength with the distance from the source, this system explores Hall effect sensing, paired with a permanent magnet, embedded in a chest strap.
- Categories:
148 Views
Reference: Laschowski B, McNally W, McPhee J, and Wong A. (2019). Preliminary Design of an Environment Recognition System for Controlling Robotic Lower-Limb Prostheses and Exoskeletons. IEEE International Conference on Rehabilitation Robotics (ICORR), pp. 868-873. DOI: 10.1109/ICORR.2019.8779540.
- Categories:
621 Views