First Name
Poramate
Last Name
Manoonpong
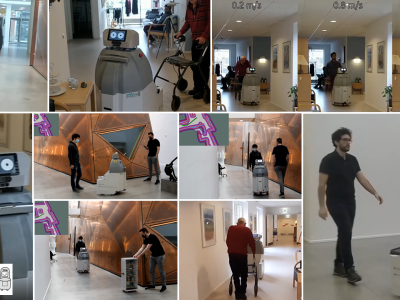
In this study, we present advances on the development of proactive control for online individual user adaptation in a welfare robot guidance scenario, with the integration of three main modules: navigation control, visual human detection, and temporal error correlation-based neural learning. The proposed control approach can drive a mobile robot to autonomously navigate in relevant indoor environments.