Abnormality in chicken tissue (breast and thigh)

- Citation Author(s):
-
Yana Sosnovskaya
 (University of Washington)
(University of Washington)
- Submitted by:
- Yana Sosnovskaya
- Last updated:
- DOI:
- 10.21227/87d5-kd86
- Data Format:
 851 views
851 views
- Categories:
- Keywords:
Abstract
Manual palpation of organs played a vital role in detecting abnormalities in open surgeries. However, surgeons
have lost this ability with the development of minimally invasive surgeries. This challenge led to the development of artificial sensors for palpating the patient's organs and tissue. The majority of research done is related to improving the measurement of tissue compliance by the development of versatile force sensors for surgical
graspers. However, depending on the abnormality, different types of sensors could be helpful on surgical graspers. We placed sensors on the tip of the motorized surgical grasper. These include acoustic, temperature, pressure sensors, and the encoder's reading.
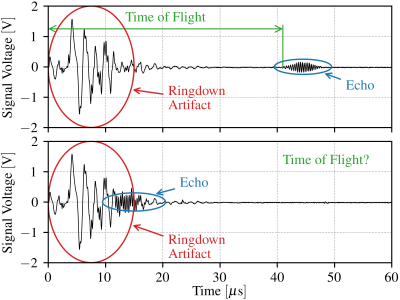
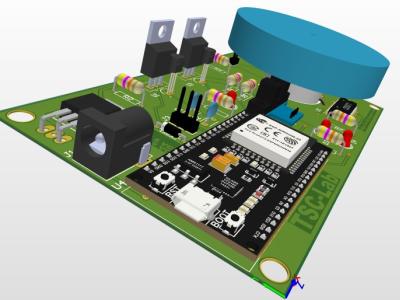
An acoustic sensor is a piezo element that excites at a 3MHz oscillation frequency, and a TDC1000 system on the chip drives it; the data is collected with an Analog Discovery 2.0 portable oscilloscope. The temperature sensor is a thermistor working together with the Wheatstone Bridge. The pressure sensor is for in-direct force measurement of surgical grasper's jaws closure. The thickness of chicken tissue is measured with the encoder's readings.
The Experiment:
The chicken breast and thigh were cut into ten pieces, and the motorized surgical robot Smart Grasper grasped each piece ten times. Then, small metal disks were placed inside these pieces, and the experiment was repeated.
The data contains time series data for four classes: chicken breast, chicken thigh, chicken breast with abnormality (metal part), and chicken thigh with abnormality (metal part).
Instructions:
Dataset name: chicken_breast_thigh_abnormality.mat
The experiments description: The Grasper grasps the chicken tissue with abnormality inside(metal parrt) and without it. The data contains time seriers data. Force, Encoder position, Temperature are aligned, each column is a new trial/ grasp (10 sec). Ultrasound is on different scale due to 3MHz frequency, it's been collected 5 ultrasound during the grasp.
abnormal_breast_force, normal_breast_force, abnormal_thigh_force, normal_thigh_force : force data from mechatronic Smart Grasper, when it squeeze the tissue
abnormal_breast_pos, normal_breast_pos, abnormal_thigh_pos, normal_thigh_pos : encoder data from mechatronic Smart Grasper, when it squeeze the tissue. Thickness of tissue.
abnormal_breast_temp, normal_breast_temp, abnormal_thigh_temp, normal_thigh_temp : temperature data from mechatronic Smart Grasper, when it squeeze the tissue. Thickness of tissue.
abnormal_breast_ultra, normal_breast_ultra, abnormal_thigh_ultra, normal_thigh_ultra : ultrasound data from mechatronic Smart Grasper, when it squeeze the tissue. 1D waveforms of ultrasound, 5 waveforms per grasp, every 2 seconds.
abnormal_breast_ultra, normal_breast_ultra_filt, abnormal_thigh_ultra_filt, normal_thigh_ultra_filt : filtered ultrasound data from mechatronic Smart Grasper, when it squeeze the tissue. 1D waveforms of ultrasound, 5 waveforms per grasp, every 2 seconds. As a filter, Bandpass filter over 3MHz is used.