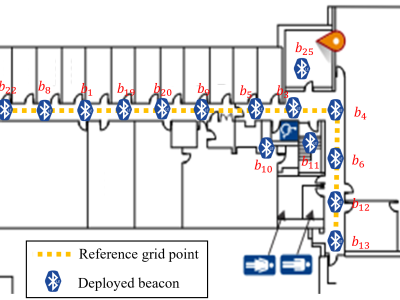
We consider a
large location with M number of grid points, each grid point is labeled with a unique fingerprint consisting of the received signal
strength (RSS) values measured from N number of Bluetooth Low Energy (BLE) beacons. Given the fingerprint observed by the
smartphone, the user’s current location can be estimated by finding the top-k similar fingerprints from the list of fingerprints registered
in the database.
- Categories: