Other

<p class="Abstract" style="margin: 0cm -1.25pt 17pt 0cm; text-align: justify; line-height: 12pt; font-size: 10pt; font-family: 'Times New Roman', serif;"><span lang="EN-US">The present study aimed to determine the responsive list width that can effectively enhance visual search efficiency and user experience on portable devices. We manipulated the width of single-column and parent-child lists (from very narrow to very wide) for portable devices with medium- (Experiment 1; N = 80) and large-width screens (Experiment 2; N = 41).
- Categories:
 10 Views
10 Views
The computer-aided design (CAD) drawing file of a trans-esophageal ultrasound robot.
- Categories:
144 Views
Spreadsheet to show error calculations for a new manuscript, "Error Checking Methodology to Verify PV Module Parameter Solutions," submitted to IEEE PV
Analysis of Kyocera KC200GT PV Module with datasheet and constant values in cells B3 to G5.
Numerical solution parameter values from 20 sources are shown in cells B10 to G29.
Calculations and error analysis with equations are shown in the spreadsheet. See the manuscript for details
- Categories:
109 Views
This data is associated with the manuscript "A Systematic Operational Performance Evaluation Framework for Public-Private Partnership Transportation Infrastructure Projects" . It is derived from the questionnaire used in the study.
- Categories:
20 Views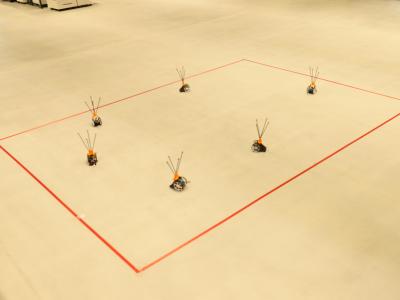
This code is with the submitted manuscript "Decentralized Optimal Coverage Control of Constant-Speed Unicycle Multi-Agent Systems Subject to State- and Input-Dependent Constraints". The code consists of MATLAB scripts and should be run in MATLAB. No version limitation and no additional toolboxes are required.
- Categories:
213 Views
This dataset corresponds to the measurements of a monostatic microwave imaging system, collected using the facility described in [1].
- Categories:
386 Views
This dataset contains RAW data of BaTiO3, CaTiO3 and SrTiO3 buffer layer on LaAlO3 substrate and YBCO grown MTO-buffered substrates. Several techniques such as TGA, SEM and XRD were introduced.
- Categories:
105 Views
This is the dataset containing the original data for article "Investigating Thermionic Emission Properties of Polycrystalline Perovskite BaMoO3" submitted to IEEE TED.
- Categories:
92 Views
Dataset for the paper titled "Comparing Three Generations of D-Wave Quantum Annealers for Minor Embedded Combinatorial Optimization Problems". This data includes the minor embeddings and raw D-Wave measurements.
- Categories:
108 Views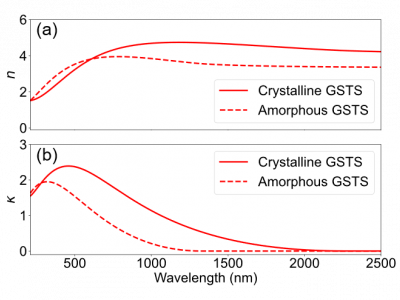
(a) Refractive index and (b) extinction coefficient spectra of Ge2Sb2Te3S2 (GSTS) measured by spectroscopic ellipsometry in the wavelength range from 200 nm to 2500 nm.
- Categories:
242 Views