Aerial Robotics

This dataset inludes a nonlinear disturbance observer (NDOB)-based controller for attitude and altitude control of a quadrotor. The NDOB is used to estimate and compensate disturbances that are imposed naturally on the quadrotor due to aerodynamics and parameter uncertainties. It is demonstrated herein that the proposed observer can estimate external disturbances asymptotically.
- Categories:
 652 Views
652 Views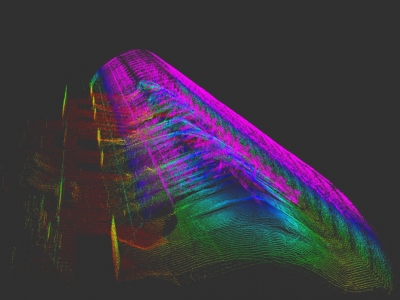
Dataset of rosbags collected during autonomous drone flight inside a warehouse of stockpiles. PCD files created using reconstruction method proposed by article.
Data still being move to IEEE-dataport.
- Categories:
1973 Views