Stable and efficient walking strategies for humanoid robots usually relies on assumptions regarding terrain characteristics. If the robot is able to classify the ground type at the footstep moment, it is possible to take preventive actions to avoid falls and to reduce energy consumption.
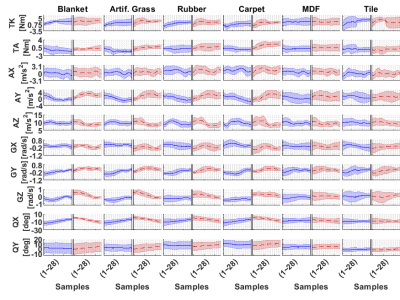
This dataset contains raw data from 10 inertial and torque sensors of a humanoid robot, sampled after the impact between foot and ground. There are two types of data: simulated using gazebo and data from a real robot.
- Categories: