Cooperative Localization in Vehicular Networks Dataset
- Citation Author(s):
-
Susana Cruz
 (Instituto de Telecomunicações; Universidade do Porto)
Ana Aguiar
(Instituto de Telecomunicações; Universidade do Porto)
(Instituto de Telecomunicações; Universidade do Porto)
Ana Aguiar
(Instituto de Telecomunicações; Universidade do Porto)
- Submitted by:
- Susana Bulas Cruz
- Last updated:
- DOI:
- 10.21227/jtqe-q772
- Data Format:
 2936 views
2936 views
- Categories:
- Keywords:
Abstract
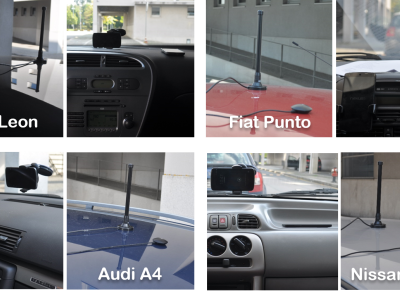
Dataset of V2V (vehicle to vehicle communication), GPS, inertial and WiFi data collected during a road vehicle trip in the city of Porto, Portugal. Four cars were driven along the same route (approx. 12 km), facing everyday traffic conditions with regular driving behavior. No special environments or settings were chosen, other than keeping the vehicles in communication reach of each other for as long as possible while being safe and compliant with the road rules. Each vehicle was equipped with a purpose-built development platform for vehicle communication, NEC LinkBird MX, which implements 802.11p wireless standard (5.85–5.925 GHz) and has built-in beaconing functionality of 50 beacons per second. A GPS receiver was positioned on vehicle’s rooftop, connected to the LinkBird. Inside, two Nexus 4 or 5 smartphones fixed on the windshield or dashboard collect inertial, Wi-Fi and GPS measurements with the maximum possible sampling rates.
The dataset was collected and used in order to develop a proof-of-concept for "Neighbor-Aided Localization in Vehicular Networks" (DOI: 10.1109/TITS.2017.2655146), an approach that fuses several information sources in a particle filter, leveraging RSSI from V2V communications to improve vehicle localization performance.