Human-Robot Interaction

As human-robot interaction rapidly spreads in numerous fields, the subject of robot acceptance gains increasing importance. Visual similarity to the human body, as occurs for humanoids, is generally not enough to guarantee acceptance in physical interaction, as acceptance directly links to comfort and ergonomics, which are measured in terms of the quality of the robot movement perceived by the human. This paper discusses the connection between comfort and similarity of the robot movement to the human one.
- Categories:
 120 Views
120 Views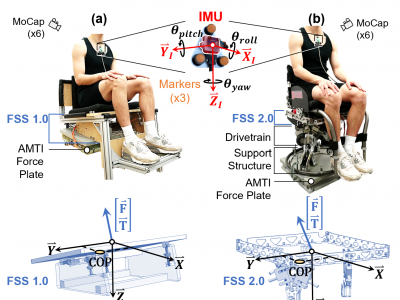
This data was collected during a validation study of our Torso-Dynamics Estimation System (TES). The TES consisted of a Force Sensing Seat (FSS) and an inertial measurement unit (IMU) that measured the kinetics and kinematics of the subject's torso motions. The FSS estimated the 3D forces, 3D moments, and 2D COPs while the IMU estimated the 3D torso angles. To validate the TES, the FSS and IMU estimates were compared to gold standard research equipment (AMTI force plate and Qualisys motion capture system, respectively).
- Categories:
121 Views
Synergistic prostheses enable the coordinated movement of the human-prosthetic arm, as required by activities of daily living. This is achieved by coupling the motion of the prosthesis to the human command, such as residual limb movement in motion-based interfaces. Previous studies demonstrated that developing human-prosthetic synergies in joint-space must consider individual motor behaviour and the intended task to be performed, requiring personalisation and task calibration.
- Categories:
453 Views